Carnegie Learning Math Series Volume 1 4th Edition Chapter 1 Linear Equations
Carnegie Learning Math Series Volume 14th Edition Chapter 1 Exercise 1.2 Solution Page 15 Problem 1 Answer
Given: Amy and Damon were solving similar equations from their math homework using different methods and got two different answers.
To find: How can you interpret the final equation in each solution and Is the final equation always true, sometimes true, or never true?
In the first solution, Amy used the inverse operation method to eliminate the variable x where whereas Damon has used elimination method to eliminate the constant values.
Both the solutions are correct and the final equation is always true.
The final equation in each solution is interpreted according to the method used and the final equation is always true.
Page 15 Problem 2 Answer
Given: we have given that Amy and Damon were solving an equation
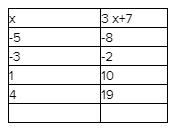
To find: Here we have to Complete the table by substituting the given values of x into the expressions from each side of the equation.
We have given equation 3x+7
We have given equation 5x+2(3−x)+1
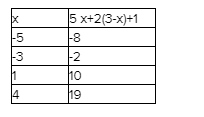
We conclude that both the equation are colinear mean both having same value.
Page 18 Problem 3 Answer
Given expression:
3x+7=5x+2(3−x)+1
After simplifying each side we get,
3x+7=3x+7
If you take away 3x from both sides, you end up with 1=1, a true statement.
If you take away 1 from both sides, you end up with 3x=3x, a true statement.
You can replace x with any number and you will always get a true statement.
The pan will remain balanced. This equation has infinitely many solutions.
Therefore, Amy is correct the given equation has infinite solutions.
Page 20 Problem 4 Answer
Given expression:
3(x−5)+11=x+2(x+5)
The find:
We need to interpret the final equation in each solution.
We also need to determine If the final equation is always true, sometimes true, or never true.
After simplifying the given expression we get,
3x−4=3x+10 or 3x=3x+14
In both the equations if we take any value of x the equations will not be satisfied as the equation no longer depends on the variable.
Thus, the equation will have no solution.
So, the final answer−4≠10 or 0≠14 will always be true.
Therefore, the final answer shows us that the equation has no solution.
The final answer is always true for any value of x.
Solutions For Linear Equations Exercise 1.2 In Carnegie Learning Math Series Page 20 Problem 5 Answer
Given:
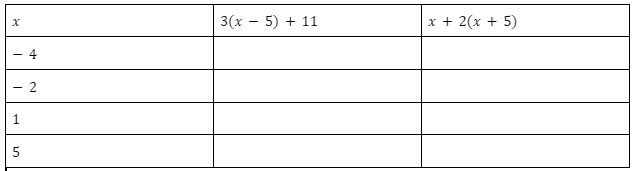
To find: We need to find the value of each expression for the given value of x.
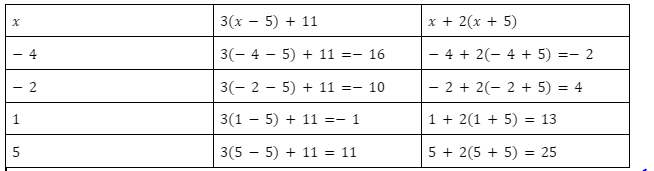
The table for the value of the each expression for given values of x is shown below:
Table-1
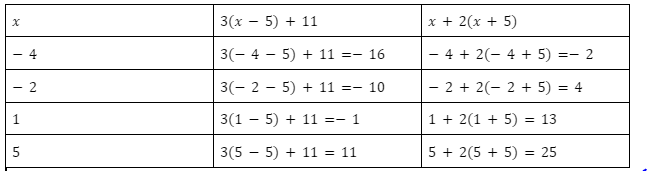
Therefore, the solution of each expression for each value of x is-
Page 20 Problem 6 Answer
Given:
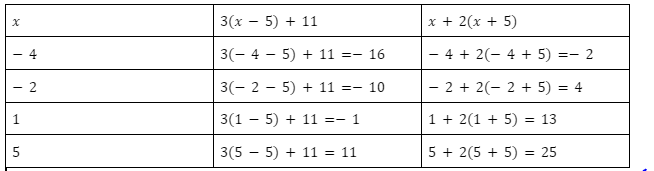
To find: We need to find if based on the results of evaluating each row if it appears that the expressions are equivalent based on the values in the table.
From the table above we can observe for each value of x the expressions have different values.
That means the value of x does not make the equation true.
So, the equation does not have any solution.
Therefore, from the table we can conclude the values of x does not make the expressions equivalent.
Page 21 Problem 7 Answer
Given expression: 3(x−5)+11=x+2(x+5)
To find: We need to graph the two expression on the coordinate planes.
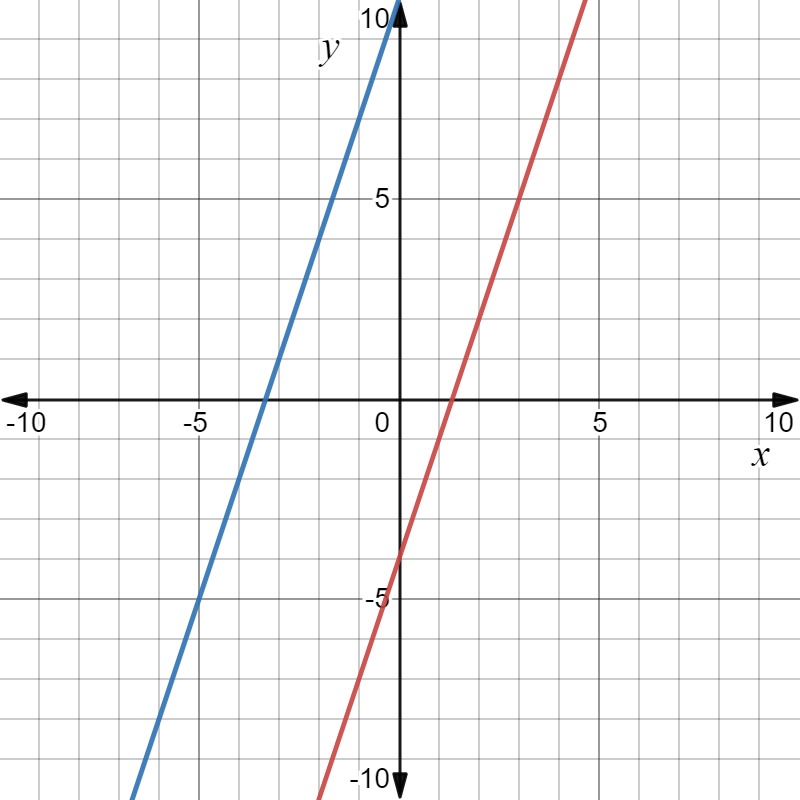
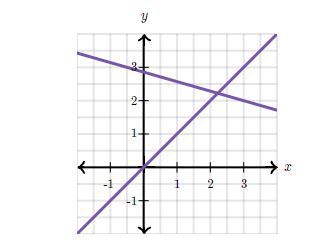
The graph for the two expressions on the both side of the equation3(x−5)+11=x+2(x+5) is shown below:
Figure-1
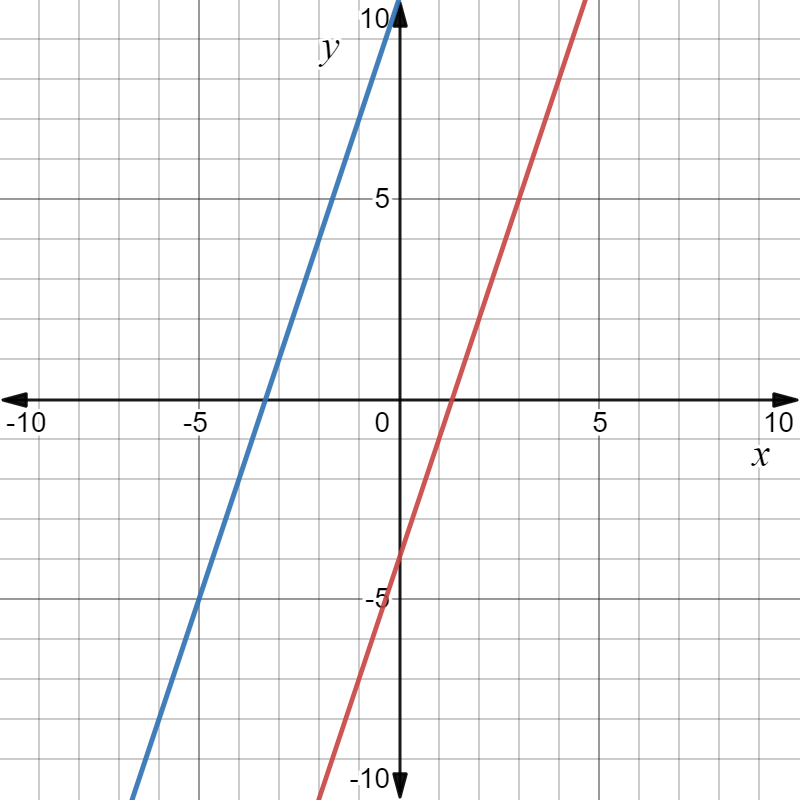
Therefore, the graph for the given equation is-
Page 21 Problem 8 Answer
The graph for the each expression on the coordinate plane has two different lines that does not intersect each other at any point.
The lines are parallel to each other.
The values of x does not make the expressions equivalent to each other.
Therefore, from the graph we can see that the lines for each expression do not intersect each other so, the equation does not have any solution.
The value of x can not make the expressions equivalent to each other.
Carnegie Learning Math Series 4th Edition Exercise 1.2 Solutions Page 21 Problem 9 Answer
Given : The equation 3(x−5)+11=x+2(x+5)
To Find: If the two graphs intersect or not
Solving 3(x−5)+11=x+2(x+5),
3(x−5)+11=x+2(x+5)
3x−15+11=x+2x+10
−4=10
There is no solution to this equation, therefore the graph doesn’t exist.
There is no solution to this equation, therefore the graph doesn’t exist.
Page 22 Problem 10 Answer
Given: An equation 2x−7+3x=4x+2
To Find: If there are no solutions, one solution, or an infinite number of solutions.
Also, to find the graph of equation with one solution
Given the equation, 2x−7+3x=4x+2
Solving,
5x−7=4x+2
x=9
Hence, this equation has one solution.
An equation has one solution when lines have different slopes.
The given equation, 2x−7+3x=4x+2, has one solution.
The lines with one solution have different slopes and their graphs intersect at a point.
Page 22 Problem 11 Answer
Given :An equation 3(x−1)+x=4(x+2)
To Find : If there are no solutions, one solution, or an infinite number of solutions .
Also, to find the graph of equation with one solution
Given the equation , 3(x−1)+x=4(x+2)
Solving,
3x−3+x=4x+8
4x−3=4x+8
−3=8, which is not valid.
Hence, there are no solutions to these equations.
An equation has one solution when lines have different slopes.
The given equation , 3(x−1)+x=4(x+2), has no solutions.
The lines with one solution have different slopes and their graphs intersect at a point.
Linear Equations Solutions Chapter 1 Exercise 1.2 Carnegie Learning Math Series Page 22 Problem 12 Answer
Given : An equation 5(2x−1)+x+17=5x+6(x+2)
To Find: If there are no solutions, one solution, or an infinite number of solutions .
Also, to find the graph of equation with one solution
Given the equation,
5(2x−1)+x+17=5x+6(x+2)
Solving,
10x−5+x+17=5x+6x+12
11x−12=11x+12
−12=12
Since, the values are equal , there are infinite number of solutions to these equations.
An equation has one solution when lines have different slopes.
The given equation , 5(2x−1)+x+17=5x+6(x+2), has infinite solutions.
The lines with one solution have different slopes and their graphs intersect at a point.
Page 23 Problem 13 Answer
Given: Any equation to solve
To Find: How we’ll know there is one solution.
Let’s take an example
Consider the equation 9(x−1)−35=8x+37
On solving we have 9x−9−35=8x+37.
9x−8x=37+35+9=80 which gives x=80
The above linear equation is only true if x=80
Hence, the given linear equation has only one solution i.e. x=80.
The linear equation which has only one value of x is said to have one solution.
Page 23 Problem 14 Answer
Given: Any equation to solve
To Find: How we’ll know there is no solution.
Let’s take an example,
5x−2+3x=3(x+4)+5x−10
8x−2=8x+2
0=4 which is not a true statement.
In this case, there is no x that will satisfy the equation given.
So the solution to this equation is: there is NO SOLUTION.
If there is no x that will satisfy the equation given.
So the solution to this equation is: there is NO SOLUTION.
Page 23 Problem 15 Answer
Given: Any equation to solve
To Find: How we’ll know there are infinitely many solutions.
An equation can have infinitely many solutions when it should satisfy some conditions.
The system of an equation has infinitely many solutions when the lines are coincident, and they have the same y-intercept.
If the two lines have the same y-intercept and the slope, they are actually in the same exact line.
As an example, consider the following two lines.
Line 1:y=x+3
Line 2:5y=5x+15
These two lines are exactly the same line. If you multiply line 1 by 5, you get the line 2.
Otherwise, if you divide the line 2 by 5, you get line 1.
It means that if the system of equations has an infinite number of solution, then the system is said to be consistent.
The system of an equation has infinitely many solutions when the lines are coincident, and they have the same y-intercept.
Step-By-step Solutions For Carnegie Learning Math Series Chapter 1 Exercise 1.2 Page 23 Problem 16 Answer
Given: Two equations y1 and y2
To Find: How will the graph look like if it has one solution
Let’s consider two equations
y1:−6x+8=y
y2:3x+y=−4
The slopes are different , therefore lines must intersect.
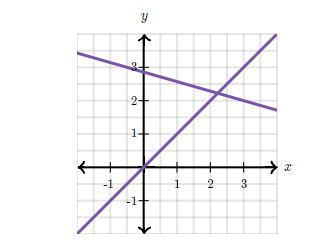
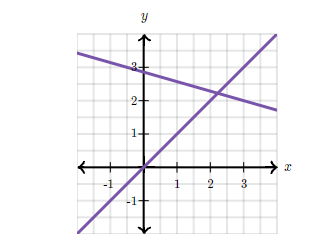
The graph is
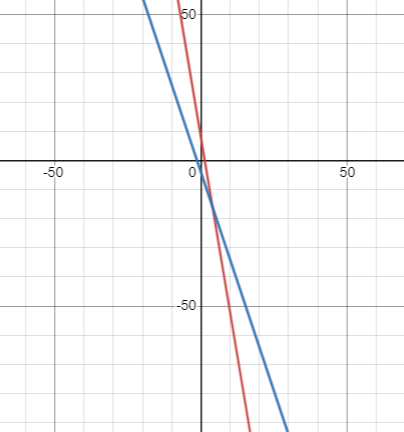
The equations which have one solution intersect at a point.
Page 23 Problem 17 Answer
Given: Two equations y1 and y2
To Find: How will the graph look like if it has no solution
Let’s take an example,
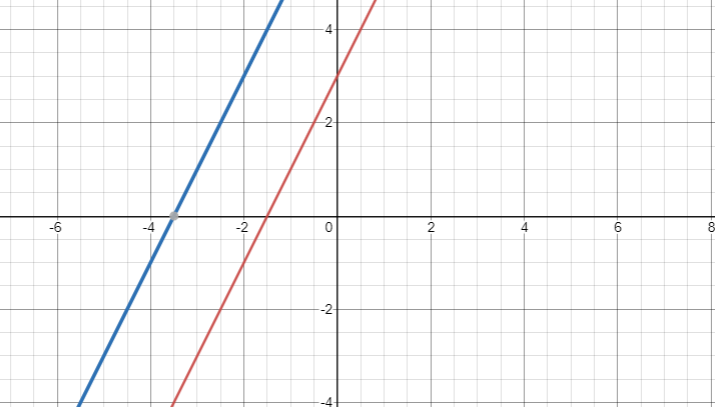
y1=2x+3 , y2=2x+7
2x+3=2x+7
3=7, which is not true
Hence, There is no solution to this system of equations.
We can see that both y1 and y2 have same slope 2,
Therefore, they are parallel.
The equations which have no solution are parallel in nature.
Carnegie Learning Math Series Chapter 1 Exercise 1.2 free solutions Page 23 Problem 18 Answer
Given: Two equations y1 and y2
To Find: How will the graph look like if it has one solution
Let y1
=−2(x+3) and y2
=−2x−6
If we carefully watch y1,
−2(x+3)=−2x−6 which is exactly same as y2
We get a statement that is always true and therefore we know there are infinite solutions.
The graph is
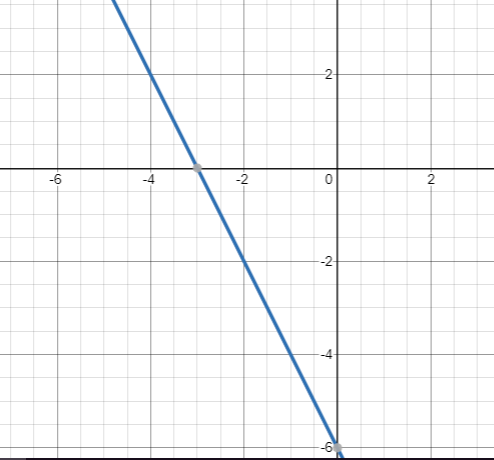
The equations which have infinite solutions overlap each other.