
Chapter 5 The Sphere
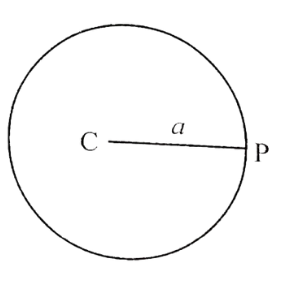
Definition. The set of points in space which are at a constant distance a(≥ 0) from a fixed point C is called a sphere.
In other words, a sphere is the locus of the points in space which are at a constant distance a(≥ 0) from a fixed point C.
C is called the centre and a is called the radius of the sphere.
If a = 0 the sphere is called a point sphere.
Chapter 5 Equation Of A Sphere
Theorem.1. Equation to the sphere with centre (x1, y1, z1) and radius a is (x – x1)2 + (y – y1)2 + (z – z1)2 = a2.
Proof. Let C = centre = (x1, y1, z1)
Let P = (x, y, z) be any point on the sphere.
By def. CP = radius = a ……(1)
⇒ \(\sqrt{\left(x-x_1\right)^2+\left(y-y_1\right)^2+\left(z-z_1\right)^2}=a\)
⇒ (x – x1)2 + (y – y1)2 + (z – z1)2 = a2
⇒ Equation to the sphere is (x – x1)2 + (y – y1)2 + (z – z1)2 = a2 …..(2)
having (x1, y1, z1) as a centre and a as radius.
Aliter. Let \(\mathrm{C}=\bar{c}\) (x1, y1, z1) be the centre of sphere Σ.
a is the radius of Σ. Let \(\mathrm{P}=\bar{r}=(x, y, z) \in \Sigma\)
P ∈ Σ.
⇒ \(\mathrm{CP}=|\overline{\mathrm{CP}}|=a \Leftrightarrow|\bar{r}-\bar{c}|=a \Leftrightarrow(\bar{r}-\bar{c})^2=a^2\) …..(1)
⇒ \((\bar{r}-\bar{c}) \cdot(\bar{r}-\bar{c})=a^2\)
⇒ (x – x1, y – y1, z – z1).(x – x1, y – y1, z – z1) = a2
⇒ (x – x1)2 + (y – y1)2 + (z – z1)2 = a2 …..(2)
∴ Equation to the sphere with centre (x1, y1, z1) and radius a is (x – x1)2 + (y – y1)2 + (z – z1)2 = a2
Equation Of The Sphere With Examples And Solutions
Note 1. The equation to the sphere with centre (0, 0, 0) and radius a is x2 + y2 + z2 = a2.
2. The equation of the sphere with centre (x1, y1, z1) and radius o is (x – x1)2 + (y – y1)2 + (z – z1)2 = 0.
3. Let \(\bar{c}(\neq 0)\) be the centre of a sphere with non-zero radius a.
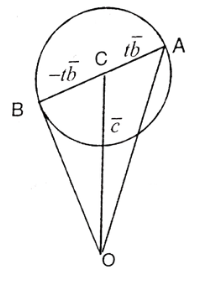
If A is a point on the sphere with position vector \(\bar{c}+t \bar{b}\) where t is a real number, then from (1) we see that \(\bar{c}+t \bar{b}\), say B is also a point on the sphere.
Further, C is the midpoint of AB. AB is called the diameter of the sphere and A, and B are called the ends of the diameter AB. Since \(t \bar{b}\) can have infinitely many values, a sphere will have infinitely many diameters.
4. For a sphere only one centre and one radius exist. Thus where the centre and radius of a sphere are given, its equation is unique.
5. Equation (2) to the sphere Σ can be written as
x2 – 2x1x + x12 + y2 – 2y1y + y12 + z2 – 2z1z + z12 = a2 i.e.
x2 + y2 + z2 + 2(-x1)x + 2(-y1)y + 2(-z1)z + (x12 + y12 + z12 – a2)= 0.
i.e., x2 + y2 + z2 + 2ux + 2vy + 2wz + d = 0 where
x1 = -u, y1 = -v, z1 = -w, d = x12 + y12 + z12 – a2 = u2 + v2 + w2 – a2
i.e., a2 = u2 + v2 + w2 – d i.e., u2 + v2 +w2 – d ≥ 0 (∵ a ≥ 0)
∴ The equation to sphere is of the form
x2 + y2 + z2 + 2ux + 2vy + 2wz + d = 0 …..(3)
where (-u, -v, -w) is the centre and \(\sqrt{u^2+v^2+w^2-d}\) is the radius.
Equation (3) is taken as the general equation of a sphere. We denote:
S ≡ x2 + y2 + z2 + 2ux + 2vy + 2wz + d = 0
S’ ≡ x2 + y2 + z2 + 2u’x + 2v’y + 2w’z + d’ = 0
If the sphere S = 0 passes through the origin, then its equation is of the form x2 + y2 + z2 + 2ux + 2vy + 2wz = 0.
6. The equation to the point sphere is of the form x2 + y2 + z2 + 2ux + 2vy + 2wz + d = 0 where d = u2 + v2 + w2 (∵ a = 0)
7. The equation x2 + y2 + z2 + 2ux + 2vy + 2wz + d = 0 i.e., (x + u)2 + (y + v)2 + (z + w)2 = u2 + v2 + w2 – d does not represent a sphere if u2 + v2 + w2 < d.
In fact, there is no point which satisfies the above equation.
8. We may observe the following characteristics in the equation of a sphere:
(1) It is a second-degree equation in x, y, and z.
(2) The coefficients of x2, y2, z2 are equal.
(3) The product terms xy, yz, and zx are absent.
9. Concentric spheres. Spheres with the same centre are known as concentric spheres. If S = 0 is a sphere, then its concentric sphere is always x2 + y2 + z2 + 2ux + 2vy + 2wz + k = 0 where k is an unknown constant.
Theorems Related To The Sphere With Proofs And Solved Examples
Example.1. Equation of the sphere of radius 3 concentric with the sphere x2 + y2 + z2 – 2x – 2y – 2z = 1 is (x – 1)2 + (y – 1)2 + (z – 1)2 = 32. i.e. x2 + y2 + z2 – 2x – 2y – 2z + (-6) = 0 since (1, 1, 1) is the centre of the given sphere.
Example.2. Equation of the sphere concentric with the sphere x2 + y2 + z2 – 2x – 2y – 2z = 1 and of double its surface area is (x – 1)2 + (y – 1)2 + (z – 1)2 = 8.
Since: Given sphere radius = r =\(\sqrt{1+1+1+1}=2\) and radius of required sphere = R.
Here 4πR2 = 2 x 4πr2 = 2 x 4π x 4 ⇒ R2 = 8.
Step-By-Step Solutions For Sphere Equations Problems
Theorem.2. The equation ax2 + by2 + cz2 + 2fyz + 2gzx + 2hxy + 2ux + 2vy + 2wz + d = 0 represents a sphere if a = b = c ≠ 0, f = g = h = 0 and u2 + v2 +w2 > ad.
Proof. If a = b = c ≠ 0, f = g = h = 0, then the equation becomes ax2 + ay2 +az2 + 2ux + 2vy + 2wz + d =0.
i.e., \(x^2+y^2+z^2+2\left(\frac{u}{a}\right) x+2\left(\frac{v}{a}\right) y+2\left(\frac{w}{a}\right) z+\frac{d}{a}=0\),
Since u2 + v2 +w2 > ad, \(\frac{u^2}{a^2}+\frac{v^2}{a^2}+\frac{w^2}{a^2}-\frac{d}{a}=\frac{u^2+v^2+w^2-a d}{a^2}>0\)
i.e. (radius)2 > 0
∴ The given equation represents a sphere with centre = \(\left(\frac{-u}{a}, \frac{-v}{a}, \frac{-w}{a}\right)\)
and radius = \(\frac{\sqrt{u^2+v^2+w^2-a d}}{a}\)
if a = b = c ≠ 0, f = g = h = 0 and u2 + v2 +w2 > ad.
Chapter 5 The Sphere Arbitrary Constants Or Parameters In The Equation Of A Sphere
Consider the equation x2 + y2 + z2 + 2ux + 2vy + 2wz + d = 0. It represents a sphere for a set of values of u, v, w, d such that u2 + v2 +w2 – d ≥ 0. Since there are four parameters in the equation, the equation to a sphere can be uniquely determined only if four conditions, such that each condition gives rise to one relation linear between the four parameters, are given. In particular, we can have a unique sphere when four non-coplanar points on the sphere are given. On the other hand if lesser number of conditions are given we can have infinitely many spheres satisfying the given conditions.
Arbitrary Constants In The Equation Of A Sphere Explained
Theorem.3. Equation to the sphere passing through for non-coplanar points A(x1, y1, z1), B(x2, y2, z2), C(x3, y3, z3), D(x4, y4, z4) is
⇒ \(\left|\begin{array}{ccccc}
x^2+y^2+z^2 & x & y & z & 1 \\
x_1^2+y_1^2+z_1^2 & x_1 & y_1 & z_1 & 1 \\
x_2^2+y_2^2+z_2^2 & x_2 & y_2 & z_2 & 1 \\
x_3^2+y_3^2+z_3^2 & x_3 & y_3 & z_3 & 1 \\
x_4^2+y_4^2+z_4^2 & x_4 & y_4 & z_4 & 1
\end{array}\right|=0\)
Proof. Let a sphere through A, B, C, and D be
x2 + y2 + z2 + 2ux + 2vy + 2wz + d = 0 …..(1)
since (1) contains the points
A(x1, y1, z1), B(x2, y2, z2), C(x3, y3, z3), D(x4, y4, z4) we have
x12 + y12 + z12 + 2ux1 + 2vy1 + 2wz1 + d= 0 …..(2)
x22 + y22 + z22 + 2ux2 + 2vy2 + 2wz2 + d = 0 …..(3)
x32 + y32 + z32 + 2ux3 + 2vy3 + 2wz3 + d = 0 …..(4)
x42 + y42 + z42 + 2ux4 + 2vy4 + 2wz4 + d = 0 …..(5)
Further A, B, C, and D are non-coplanar.
⇒ \(\left|\begin{array}{llll}
x_1 & y_1 & z_1 & 1 \\
x_2 & y_2 & z_2 & 1 \\
x_3 & y_3 & z_3 & 1 \\
x_4 & y_4 & z_4 & 1
\end{array}\right| \neq 0\)
Hence equations (2), (3), (4), and (5) have a unique solution. For this solution i.e., for unique values of u, v, w, d there exists a unique sphere passing through the non-coplanar points. Its equation is obtained by eliminating u, v, w, and d from the equations (1), (2), (3), (4), (5).
∴ The equation to the required sphere is I.
Note 1. In numerical problems it is convenient to solve the equations (2), (3), (4), (5) for u, v, w, d and substitute the values in (1) to get the equation to the required sphere.
2. If \(\left|\begin{array}{llll}
x_1 & y_1 & z_1 & 1 \\
x_2 & y_2 & z_2 & 1 \\
x_3 & y_3 & z_3 & 1 \\
x_4 & y_4 & z_4 & 1
\end{array}\right|=0\) then A, B, C, D are coplanar and no sphere through A, B, C, D is possible.
Chapter 5 The Sphere Solved Problems
Example.1. Find t, if the radius of the sphere x2 + y2 + z2 + 6x – 8y – t = 0 is 6.
Solution. Radius = \(\sqrt{9+16+0+t}=6\) (given).
∴ 25 + t = 36 ⇒ t = 11
Plane Section Of A Sphere With Examples And Solutions
Example.2. Find the equation to the sphere through O = (0, 0, 0) and make intercepts a, b, and c on the axes.
Solution.
Given
O = (0, 0, 0)
Let the sphere through O intersect the axes at A, B, and C.
∴ A = (a, 0, 0), B = (0, b, 0), C = (0, 0, c).
Let the equation to the sphere through O, A, B, C be
x2 + y2 + z2 + 2ux + 2vy + 2wz + d = 0 …..(1)
∴ d = 0. Also a2 + 2ua = 0 i.e., \(u=-\frac{a}{2}\).
Similarly \(v=-\frac{b}{2} ; w=-\frac{c}{2}\).
∴ The equation to the sphere passing the origin and making intercepts a, b, and c on the axes is x2 + y2 + z2 – ax – by – cz = 0.
Its centre = \(\left(\frac{a}{2}, \frac{b}{2}, \frac{c}{2}\right)\) and radius = \(\frac{\sqrt{a^2+b^2+c^2}}{2}\)
Note 1. The above result may be taken as a formula.
2. The above equation is the equation of the sphere passing through (0, 0, 0), (a, 0, 0), (0, b, 0) and (0, 0, c).
3. Find the equation of the sphere through the points (0, 0, 0), (1, 0, 0), (0, 0, 1), (0, 1, 0)
Solution. Put a = 1, b = 1, c = 1 in the above problem x2 + y2 + z2 – x – y – z = 0.
Understanding Sphere Equations With Arbitrary Constants
Example.3. Find the equation of the sphere circumscribing the tetrahedron formed by the planes \(\frac{y}{b}+\frac{z}{c}=0, \frac{z}{c}+\frac{x}{a}=0, \frac{x}{a}+\frac{y}{b}=0, \frac{x}{a}+\frac{y}{b}+\frac{z}{c}=1\).
Solution. Given faces of the tetrahedron are
⇒ \(\frac{y}{b}+\frac{z}{c}=0\) …..(1)
⇒ \(\frac{z}{c}+\frac{x}{a}=0\) …..(2)
⇒ \(\frac{x}{a}+\frac{y}{b}=0\) …..(3)
⇒ \(\frac{x}{a}+\frac{y}{b}+\frac{z}{c}=1\) …..(4)
Solving (1), (2), (3): O = (0, 0, 0). Solving (1), (2), (4): A = (a, b, -c).
Solving (1), (3), (4): B = (a, -b, c). Solving (2), (3), (4): C = (-a, b, c).
Let the sphere through O, A, B, and C be
x2 + y2 + z2 + 2ux + 2vy + 2wz = 0 …..(5)
A ∈ (5) ⇒ a2 + b2 + c2 + 2ua + 2vb – 2wc = 0 …..(6)
B ∈ (5) ⇒ a2 + b2 + c2 + 2ua – 2vb + 2wc = 0 …..(7)
C ∈ (5) ⇒ a2 + b2 + c2 – 2ua + 2vb + 2wc = 0 …..(8)
(6) + (7) ⇒ \(4 u a=-2\left(a^2+b^2+c^2\right) \Rightarrow 2 u=-\frac{a^2+b^2+c^2}{a}\)
Similarly \(2 v=-\frac{a^2+b^2+c^2}{b}, 2 w=-\frac{a^2+b^2+c^2}{c}\)
Substituting these values in (5) we get
⇒ \(x^2+y^2+z^2-\left(a^2+b^2+c^2\right) \frac{x}{a}-\left(a^2+b^2+c^2\right) \frac{y}{b}-\left(a^2+b^2+c^2\right) \frac{z}{c}=0\)
i.e., \(\frac{x^2+y^2+z^2}{a^2+b^2+c^2}-\frac{x}{a}-\frac{y}{b}-\frac{z}{c}=0\) is the equation to the required sphere.
Applications Of Sphere Equations In Mathematics And Geometry
Example.4. A point is such that the sum of the squares of its distances from the six faces of a cube is a constant k(>0). Show that the point lies on a sphere.
Solution.
Given
A point is such that the sum of the squares of its distances from the six faces of a cube is a constant k(>0).
Let a be the edge of the cube. Let OXYZ be the frame as shown.
Equations to the six faces are y = 0, x = a, x = 0, y = a, z = 0, z = a.
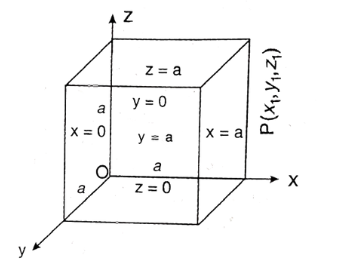
Let P(x1, y1, z1) be a point such that the sum of the squares of its distance p from the faces is k.
x12 + (x1 – a)2 + y12 + (y1 – a)2 + z12 + (z1 – a)2 = k
i.e., \(x_1^2+y_1^2+z_1^2-a x_1-a y_1-a z_1=\frac{1}{2}\left(k-3 a^2\right)\)
∴ P(x1, y1, z1) lies on the sphere.
⇒ \(x^2+y^2+z^2-a(x+y+z)+\frac{1}{2}\left(3 a^2-k\right)=0\)
Example.5. A plane passes through a fixed point (a, b, c) and intersects the axes in A, B, C. Show that the centre of the sphere OABC lies on \(\frac{a}{x}+\frac{b}{y}+\frac{c}{z}=2\).
Solution.
Given
A plane passes through a fixed point (a, b, c) and intersects the axes in A, B, C.
Let the sphere through O, A, B, and C be
x2 + y2 + z2 + 2ux + 2vy + 2wz = 0 …..(1)
Since A ∈ x-axis, from (1), x = -2u
∴ Equation to the plane \(\overleftrightarrow{\mathrm{ABC}} \text { is } \frac{x}{-2 u}+\frac{y}{-2 v}+\frac{z}{-2 w}=1\)
Since this plane passes through the point (a, b, c), we have
⇒ \(\frac{a}{-2 u}+\frac{b}{-2 v}+\frac{b}{-2 w}=1 \Rightarrow \frac{a}{-u}+\frac{b}{-v}+\frac{c}{-w}=2\)
∴ The centre (-u, -v, -w) of the sphere OABC lies on \(\frac{a}{x}+\frac{b}{y}+\frac{c}{z}=2\).
Example.6. A sphere of constant radius r passes through the origin O and cuts the axes in A, B, C. Prove that the foot of the perpendicular from O to the plane \(\overleftrightarrow{A B C}\) lies on (x2 + y2 + z2)2(x-2 + y-2 + z-2) = 4r2.
Solution.
Given
A sphere of constant radius r passes through the origin O and cuts the axes in A, B, C.
Let the plane \(\overleftrightarrow{A B C}\) be \(\frac{x}{a}+\frac{y}{b}+\frac{z}{c}=1\)
∴ A = (a, 0, 0), B = (0, b, 0), C = (0, 0, c).
∴ The equation to the sphere through O, A, B, C is
x2 + y2 + z2 – ax – by – cz = 0 …..(2)
Since the radius of (2) is r, \(\frac{a^2}{4}+\frac{b^2}{4}+\frac{c^2}{4}=r^2 \Rightarrow a^2+b^2+c^2=4 r^2\) …..(3)
The equation to the line through O and perpendicular to the plane (1) is \(\frac{x-0}{1 / a}=\frac{y-0}{1 / b}=\frac{z-0}{1 / c}(=\lambda \text { say })\) …..(4)
∴ A point on (4) is (λ/a, λ/b, λ/c).
P(x1, y1, z1) is the foot of the perpendicular from O to \(\overleftrightarrow{\mathrm{ABC}}\).
⇒ \(x_1=\frac{\lambda}{a}, y_1=\frac{\lambda}{b}, z_1=\frac{\lambda}{c} ; \frac{x_1}{a}+\frac{y_1}{b}+\frac{z_1}{c}=1 from (1)\)
⇒ \(a=\frac{\lambda}{x_1}, b=\frac{\lambda}{y_1}, c=\frac{\lambda}{z_1} ; \frac{x_1}{a}+\frac{y_1}{b}+\frac{z_1}{c}=1\)
⇒ \(\lambda^2\left(\frac{1}{x_1^2}+\frac{1}{y_1^2}+\frac{1}{z_1^2}\right)=4 r^2 \text { from (3), } \frac{x_1^2}{\lambda}+\frac{y_1^2}{\lambda}+\frac{z_1^2}{\lambda}=1\)
⇒ (x12 + y12 + z12)2 (x1-2 + y1-2 + z1-2) = 4r2
∴ Foot of the perpendicular from O to the plane \(\overleftrightarrow{\mathrm{ABC}}\) lies on
(x2 + y2 + z2)2(x-2 + y-2 + z-2) = 4r2.
Example.7. A sphere of constant radius k passes through the origin and intersects the axes in A, B, C. Prove that the centroid of the △ABC lies on the sphere 9(x2 + y2 + z2) = 4k2.
Solution.
Given
A sphere of constant radius k passes through the origin and intersects the axes in A, B, C.
Let OA = a, OB = b, OC = c
⇒ Coordinates of A, B, C are (a, 0, 0), (0, b, 0), (0, 0, c)
⇒ The equation of the sphere OABC is
x2 + y2 + z2 – ax – by – cz = 0 …..(1)
The radius of the sphere (1) is
k = \(\sqrt{\frac{a^2}{4}+\frac{b^2}{4}+\frac{c^2}{4}} \Rightarrow a^2+b^2+c^2=4\) k^2 …..(2)
Let (x1, y1, z1) be the centroid of the △ABC.
Then \(\left.\begin{array}{l}
x_1=\frac{a+0+0}{3} \Rightarrow a=3 x_1 \\
y_1=\frac{0+b+0}{3} \Rightarrow b=3 y_1 \\
z_1=\frac{0+0+c}{3} \Rightarrow c=3 z_1
\end{array}\right\}\) …..(3)
Substituting values of a, b, and c from (3) in (2) we get, 9x12 + 9y12 + 9z12 = 4k2.
The locus of (x1, y1, z1) is 9(x2 + y2 + z2) = 4k2 …..(4)
The centroid of the △ABC lies on the sphere (4).
Chapter 5. Plane Sections Of A Sphere
Definition. If ξ is a sphere and π is a plane, the non-empty set of points common to the sphere ξ and the plane π is called a plane section of the sphere. Then we say that the plane π intersects the sphere ξ.
We, therefore, have:
P is a point on the plane section of π with ξ
⇒ P ∈ π ∩ ξ <=> P ∈ π and P ∈ ξ
Theorem.4. A Plane section of a sphere of radius a(>0) is a circle.
Proof. Let ξ be a sphere with centre O,
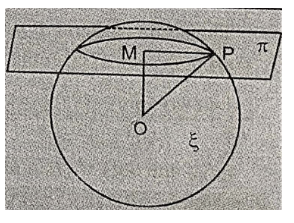
Radius of ξ is a(>0).
Let π be a plane making a plane section on ξ.
Let M be the foot of the perpendicular from O to the plane π so that M and O are different.
Case(1). Let M ≠ P. Then OM ⊥ MP.
Since ∠OMP = 90°, MP2 = OP2 – OM2 = a – OM2.
Now O and M are fixed points and hence OM is fixed.
∴ MP is a constant for all P ∈ ξ ∩ π.
∴ The plane section is a circle with centre M and radius \(\sqrt{a^2-\mathrm{OM}^2}\).
Case(2). Let M = P. The case is trivial and the plane section is a point circle.
If M = O, then MP = OP = a (constant)
i.e., if the plane π passes through the centre of a sphere ξ, then the plane section is a circle with centre O and radius a.
Chapter 5 The Sphere Great Circle, Small Circle
Definition. If a plane π passes through the centre of a sphere ξ, then the plane section of the sphere is called a great circle.
The centre and radius of the great circle are respectively the centre and radius of the sphere.
Definition. If a plane π does not pass through the centre of a sphere ξ and intersects the sphere ξ, then the plane section is called a small circle.
The centre of the small circle is the foot of the perpendicular from the centre of the sphere to the plane π and the radius of the small circle is less than the radius of the sphere ξ.
Note. One and only one circle passes through three non-collinear points. The circle through three given points lies entirely on any sphere through the same three points. Thus if a circle lies on a sphere, then the sphere passes through any three points on the circle.
Chapter 5 Condition For A Plane To Intersect A Sphere
There exist points of intersection of the sphere and a plane if and only if the distance of the centre of the sphere from the plane is less than or equal to the radius of the sphere.
Thus: the sphere x2 + y2 + z2 + 2ux + 2vy + 2wz + d = 0 will intersect the plane lx + my + nz = p if and only if
⇒ \(\left|\frac{l(-u)+m(-v)+n(-w)-p}{\sqrt{l^2+m^2+n^2}}\right| \leq \sqrt{u^2+v^2+w^2-d}\)
i.e. if and only if (lu + mv + nw + p)2 ≤ (l2 + m2 + n2)(u2 + v2 + w2 – d).
Chapter 5 Intersection Of Two Spheres
Let ξ1, ξ2 be two spheres. If ξ1 ∩ ξ2 ≠ Φ, we say that the spheres ξ1 and ξ2 intersect or cut and ξ1, ξ2 intersect or cut and ξ1, ξ2 are called intersecting spheres. If ξ1 ∩ ξ2 ≠ Φ, we say that the sphere ξ1 and ξ2 do not intersect or cut and ξ1, ξ2 are called non-intersecting spheres.
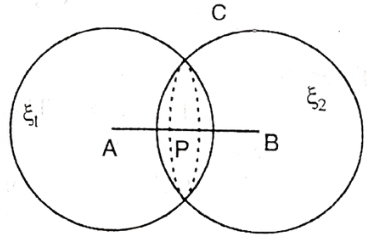
Theorem.5. If two spheres intersect, then the locus of the set of points of intersection is a circle.
Proof. Let S = 0, S’ = 0 be two intersecting spheres where
S ≡ x2 + y2 + z2 + 2ux + 2vy + 2wz + d = 0,
S’ ≡ x2 + y2 + z2 + 2u’x + 2v’y + 2w’z + d’ = 0
S – S’ ≡ 2(u – u’)x + 2(v – v’)y + 2(w – w’)z + (d – d’) = 0
Clearly S – S’ = 0, being of first degree, is a plane. Also the coordinates of the points common to two spheres satisfy both S = 0, S’ = 0 and therefore S – S’ = 0.
Thus the points common to two spheres are the same as those any one of them and this plane and, therefore, they determine a circle.
Note 1. S = 0, S’ = 0 are two spheres intersecting in a circle C. Then equations to C are S = 0, S – S’ = 0 or S’ = 0, S – S’ = 0.
2. U = 0 is a plane and S = 0 is a sphere such that the plane section of the sphere is the circle C. Then the equations S = 0, U = 0 together represent the circle C. The equations x2 + y2 + + 2gx + 2fy + c = 0, z = 0 represent a circle.
3. A, B are the centres of two intersecting spheres.
Let C be the circle (not a point circle) with centre P. Then
(1) the line \(\overleftrightarrow{\mathrm{AB}}\) is perpendicular to the plane of the circle C and
(2) the line \(\overleftrightarrow{\mathrm{AB}}\) passes through the centre P i.e. A, P, B aare collinear.
Chapter 5 The Sphere Solved Problems
Example.1. Find the radius of the circle x2 + y2 + z2 – 2x + 4y – 6z – 2 = 0, z = 0.
Solution. For the sphere: centre = (1, -2, 3) and radius = \(\sqrt{(1+4+9+2)}=4\)
The distance of (1, -2, 3) from the plane z = 0 is 3.
∴ radius of the circle = \(+\sqrt{16-9}=+\sqrt{7}\).
Example.2. prove that the circle x2 + y2 + z2 – 4x – 2y + 5z + 6 = 0, x + y + 2z + 2 = 0 is a great circle.
Solution. Centre of the sphere (2, 1, -5/2) lies on the plane x + y + 2z + 2 = 0
Example.3. Are there points of intersection of the sphere x2 + y2 + z2 + 3x + 5y – 2z + 9 = 0 with the plane x – y + 2z + 2 = 0?
Solution. For the sphere: centre = \(\left(-\frac{3}{2}, \frac{-5}{2}, 1\right)\) and radius = \(\sqrt{\frac{9}{4}+\frac{25}{4}+1-9}=\frac{1}{\sqrt{2}}\)
Distance of the centre from the plane x – y + 3z + 6 = 0
= \(\frac{-\frac{3}{2}-\left(-\frac{5}{2}\right)+3(1)+6}{\sqrt{\frac{9}{4}+\frac{25}{4}+1}}=\frac{20}{\sqrt{38}}>\text { radius }\left(=\frac{1}{\sqrt{2}}\right)\)
∴ There are no points of intersection of the sphere with the plane (i.e. the sphere is not intersected by the plane).
Example.4. If the spheres x2 + y2 + z2 – 2x – 4y – 11 = 0 …..(1) x2 + y2 + z2 + 2x – y + 12z + 5 = 0 …..(2) intersect in a circle, find its equation.
Solution. The plane of intersection of the spheres is – 4x – 3y – 12z – 16 = 0
i.e. 4x + 3y + 12z + 16 = 0 …..(3)
∴ Equation to the circle of intersection of (1) and (2) is (1), (3) or (2), (3).
Theorem.6. If AB is a diameter of a sphere ξ with centre O, then P(≠ A, ≠ B) ∈ ξ ⇒ ∠APB = 90°.
Proof. Let O = (0, 0, 0), P = (x1, y1, z1) A = (x2, y2, z2).
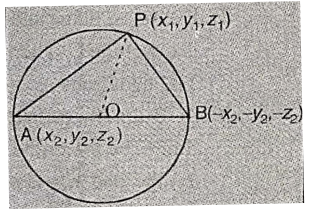
Since O is the mid point of AB, B = (-x2, -y2, -z2)
∴ \(\overline{\mathrm{P}}=\left(x_1, y_1, z_1\right), \overline{\mathrm{A}}=\left(x_2, y_2, z_2\right),\)
Dr’s of \(\overline{\mathrm{PA}}=\left(x_2-x_1, y_2-y_1, z_2-z_1\right)\)
Dr’s of \(\overline{\mathrm{PB}}=\left(-x_2-x_1,-y_2-y_1,-z_2-z_1\right)\)
Also radius of the sphere \(|\overline{\mathrm{OP}}|=|\overline{\mathrm{OA}}|\).
= x12 + y12 + z12 = x22 + y22 + z22
Consider (x2 – x1)(- x2 – x1) + (y2 – y1)(- y2 – y1) + (z2 – z1)(- z2 – z1)
= -(x22 + y22 + z22) + (x12 + y12 + z12) = 0.
∴ ∠APB = 90°.
Note. If \(\overleftrightarrow{\mathrm{PAB}}\) is the plane section of ξ then the plane section is a great circle and hence ∠APB = 90° from the properties of circles.
Theorem.7. Equation to the sphere having A = (x1, y1, z1) and B = (x2, y2, z2) as the ends of the diameter is (x – x1)(x – x2) + (y – y1)(y – y2) + (z – z1)(z – z2) = 0
First Proof. Let ξ be the sphere with AB as diameter.
Let P = (x, y, z) ∈ ξ.
Given A = (x1, y1, z1), B = (x2, y2, z2).
If P ≠ A, P ≠ B then ∠APB = 90°
The Dc’s of PA, PB are proportional to
(x – x1, y – y1, z – z1) and (x – x2, y – y2, z – z2) respectively.
PA is perpendicular to PB
<=> (x – x1)(x – x2) + (y – y1)(y – y2) + (z – z1)(z – z2) = 0
∴ Equation to the required sphere is
(x – x1)(x – x2) + (y – y1)(y – y2) + (z – z1)(z – z2) = 0.
Second Proof. Let ξ be the sphere with AB’s diameter.
Let P ∈ ξ. Let P = \(\bar{r}=(x, y, z)\).
Given A = \(\bar{a}=\left(x_1, y_1, z_1\right) \text { and } \mathrm{B}=\bar{b}=\left(x_2, y_2, z_2\right)\).
If P ≠ A, P ≠ B then ∠APB = 90° and hence \(\overline{\mathrm{PA}} \cdot \overline{\mathrm{PB}}\)
If P = A, then \(\overline{\mathrm{PA}}=0 \Rightarrow \overline{\mathrm{PA}} \cdot \overline{\mathrm{PB}}=0 \text { and If } \mathrm{P}=\mathrm{B} \text {, then } \overline{\mathrm{PB}}=0 \Rightarrow \overline{\mathrm{PA}} \cdot \overline{\mathrm{PB}}=0\)
⇒ \(\mathrm{P} \in \xi \Leftrightarrow \overline{\mathrm{PA}} \cdot \overline{\mathrm{PB}}=0 \Rightarrow \overline{\mathrm{AP}} \cdot \overline{\mathrm{BP}}=0 \Rightarrow(\bar{r}-\bar{a}) \cdot(\bar{r}-\bar{b})=0\)
⇒ \(\left(x-x_1, y-y_1, z-z_1\right) \cdot\left(x-x_2, y-y_2, z-z_2\right)=0\)
⇒ (x – x1)(x – x2) + (y – y1)(y – y2) + (z – z1)(z – z2) = 0
∴ Equation to the required sphere is
(x – x1)(x – x2) + (y – y1)(y – y2) + (z – z1)(z – z2) = 0
example. Equation of the sphere having the segment joining (2, 3, -1) and (1, -2, -1) as a diameter is (x – 2)(x – 1) + (y – 3)(y + 2) + (z + 1)(z + 1) = 0
Note. Vector equation of the sphere having the points \(\bar{a}, \bar{b}\) as the ends of a diameter is \((\bar{r}-\bar{a}),(\bar{r}-\bar{b})=0\).
Chapter 5. Sphere Through A Given Circle.
Theorem.8. If the plane U = 0 intersects the sphere S = 0, in a circle C, then for all real values of λ, S + λU = 0 represents the equation to a sphere passing through the circle C.
Proof. Let S ≡ x2 + y2 + z2 + 2ux + 2vy + 2wz + d = 0 be the sphere and
U ≡ lx + my + nz – p = 0 be the plane.
For the sphere, centre = (-u, -v, -w) and radius = \(\sqrt{u^2+v^2+w^2-d}\)
Plane U = 0 intersects the sphere S = 0
Distance of the centre from the plane ≤ radius
⇒ \(\left|\frac{l(-u)+m(-v)+n(-w)-p}{\sqrt{l^2+m^2+n^2}}\right| \leq \sqrt{u^2+v^2+w^2-d}\)
⇒ \((l u+m v+n w+p)^2 \leq\left(l^2+m^2+n^2\right)\left(u^2+v^2+w^2-d\right)\) …..(1)
S + λU ≡ x2 + y2 + z2 + 2ux + 2vy + 2wz + d + λ(lx + my + nz – p)
⇒ \(x^2+y^2+z^2+2\left(u+\frac{\lambda l}{2}\right) x+2\left(v+\frac{\lambda m}{2}\right) y+2\left(w+\frac{\lambda n}{2}\right) z+(d-\lambda p)=0\)
Now \(\left(u+\frac{\lambda l}{2}\right)^2+\left(v+\frac{\lambda m}{2}\right)^2\left(w+\frac{\lambda n}{2}\right)^2-(d-\lambda p)\)
= \(\frac{1}{4}\left(l^2+m^2+n^2\right) \lambda^2+(l u+m v+n w+p) \lambda+\left(u^2+v^2+w^2-d\right) \geq 0\),
for all real values of λ.
Since from (1), \((l u+m v+n w+p)^2-4 \cdot \frac{1}{4}\left(l^2+m^2+n^2\right)\left(u^2+v^2+w^2-d\right) \leq 0\)
∴ S + λU = 0 represents a sphere through the circle C, for all real values of λ.
Plane U = 0 intersects the sphere S = 0 in a circle C.
Note 1. If S = 0, S’ = 0 are two distinct intersecting spheres, then λ1S + λ2S’ = 0 (for real values of λ1, λ2 and λ1 + λ2 ≠ 0) represents a system of spheres passing through the circle of intersection of the spheres S = 0, S’ = 0.
Also S + λ(S – S’) = 0, λ being an arbitrary constant, represents a sphere through the circle of intersection of the spheres S = 0, S’ = 0.
2. If the equation x2 + y2 + 2gx + 2fy + c = 0, z = 0 represents a circle then the equation to any sphere through the circle is x2 + y2 + z2 + 2gx + 2fy + kz + c = 0, k being a parameter.
Chapter 5 The Sphere Solved Problems
Example.1. The plane of equation \(\frac{x}{a}+\frac{y}{b}+\frac{z}{c}=1\) meets the axes in A, B, C. Find the equation of the circumcircle of △ABC and hence find its centre.
Solution. Given plane \(\frac{x}{a}+\frac{y}{b}+\frac{z}{c}=1\) …..(1) meets the axes in A, B, C.
∴ A = (a, 0, 0), B = (0, b, 0), C = (0, 0, c).
Let x2 + y2 + z2 + 2ux + 2vy + 2wz + d = 0 be the equation of the sphere through O, A, B, C.
∴ d = 0, a2 + 2ua = 0 i.e. 2u = -a
Similarly 2v = -b, 2w = -c.
∴ Equation to the sphere through O, A, B, C is
x2 + y2 + z2 – ax – by – cz = 0 …..(2)
Since A, B, C are common points to (1) and (2) and (1) is a plane intersecting (2), through A, B, C a circle passes and it is the circumcircle of △ABC.
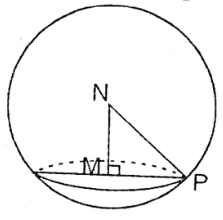
Let N be the centre of the sphere and M be the centre of the circle
∴ \(\overleftrightarrow{\mathrm{MN}} \perp \overleftrightarrow{\mathrm{ABC}}\)
∴ \(\mathrm{N}=\left(\frac{a}{2}, \frac{b}{2}, \frac{c}{2}\right) \text { and d.rs. of } \overrightarrow{\mathrm{MN}} \text { are } \frac{1}{a}, \frac{1}{b}, \frac{1}{c}\)
∴ Equation to \(\overleftrightarrow{\mathrm{MN}} \text { are } \frac{x-a / 2}{1 / a}=\frac{y-b / 2}{1 / b}-\frac{z-c / 2}{1 / c}(=t \text { say })\).
Let \(\mathrm{M}=\left(\frac{t}{a}+\frac{a}{2}, \frac{t}{b}+\frac{b}{2}, \frac{t}{c}+\frac{c}{2}\right)\)
∴ \(\mathrm{M} \in \overleftrightarrow{\mathrm{ABC}} \Rightarrow \frac{t}{a^2}+\frac{1}{2}+\frac{t}{b^2}+\frac{1}{2}+\frac{t}{c^2}+\frac{1}{2}=1 \Rightarrow t=\frac{-1}{2\left(a^{-2}+b^{-2}+c^{-2}\right)}\)
Equations to Circumcircle are (2) and (1) and the centre
⇒ \(\mathrm{M}=\left(\frac{a}{2}+\frac{t}{a}, \frac{b}{2}+\frac{t}{b}, \frac{c}{2}+\frac{t}{c}\right) \text { where } t=\frac{-1}{2\left(a^{-2}+b^{-2}+c^{-2}\right)}\)
Example.2. Show that the four points (-8, 5, 2), (-5, 2, 2), (-7, 6, 6), (-4, 3, 6) are concyclic.
Solution.
Given
(-8, 5, 2), (-5, 2, 2), (-7, 6, 6), (-4, 3, 6)
Let A = (-8, 5, 2), B = (-5, 2, 2), C = (-7, 6, 6), D =(-4, 3, 6)
Let l, m, n be d.rs. of normal to the plane \(\overleftrightarrow{\mathrm{ABC}}\).
∴ \(\left.\begin{array}{c}
3 l-3 m+0 n=0 \\
l+m+4 n=0
\end{array}\right\} \frac{l}{-12}=\frac{m}{-12}=\frac{n}{6} \Rightarrow \frac{l}{2}=\frac{m}{2}=\frac{n}{-1}\)
∴ Equation to \(\overleftrightarrow{\mathrm{ABC}}\) is 2(x + 8) + 2(y – 5) – 2(z – 2) = 0 i.e. 2x + 2y – z + 8 = 0 …..(1)
Let the equation of the sphere ξ through O, A, B, and C be x2 + y2 + z2 + 2ux + 2vy + 2wz = 0.
∴ A ∈ ξ ⇒ 64 + 25 + 4 – 16u + 10v + 4w = 0
⇒ -16u + 10v + 4w = -93 …..(2)
B ∈ ξ ⇒ 25 + 4 + 4 – 10u + 4v + 4w = 0
-10u + 4v + 4w = -33 …..(3)
C ∈ ξ ⇒ 49 + 36 + 36 – 14u + 12v + 12w = 0
-14u + 12v + 12w = -121 …..(4)
(2) – (3): -6u + 6v = -60 ⇒ u – v = 10 …..(5)
– 3 x (3) + (4) : 16u = -22 ⇒ u = -11/8
∴ From (5), \(\frac{-11}{8}-v=10 \Rightarrow v=\frac{-91}{8}\)
From (3), \(\frac{110}{8}-\frac{364}{8}+4 w=-33\)
⇒ – 254 + 32w = -264 ⇒ 32w = – 10 ⇒ w = -5/16
∴ Equation to the sphere ξ is \(x^2+y^2+z^2-\frac{22}{8} x-\frac{182}{8} y-\frac{5}{8} z=0\)
⇒ 8(x2 + y2 + z2) – 22x – 182y – 5z = 0 …..(6)
Now D = (-4, 3, 6) satisfies (1) and (6).
[∵ -8, + 6 -6 + 8 = 0, 8(16 + 9 + 36) + 88 – 546 – 30 = 0]
∴ D is concyclic with the points A, B, and C and the equation to the circle is given by (1) and (6).
Example.3. Find the equations of the spheres passing through the circle x2 + y2 = 4, z = 0 and is intersected by the plane x + 2y + 2z = 0 in a circle of radius 3.
Solution. Let the required sphere be ξ
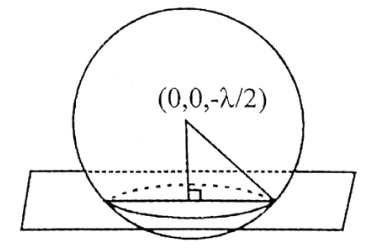
i.e. x2 + y2 + z2 – 4 + λz = 0
Centre of ξ is (0, 0, -λ/2) and radius of ξ is \(\sqrt{\frac{\lambda^2}{4}+4}\).
Given plane is x + 2y + 2z = 0.
∴ perpendicular distance of the centre of the sphere from the plane
= \(\left|\frac{0+0-2 \cdot \lambda / 2}{\sqrt{1+4+4}}\right|=\frac{|\lambda|}{3}\)
∴ \(\frac{\lambda^2}{9}+9=\frac{\lambda^2}{4}+4 \Rightarrow \lambda=\pm 6\)
∴ The equation to the required spheres is \(x^2+y^2+z^2 \pm 6 z-4=0\).
Example.4. Prove that the plane x + 2y – z = 4 intersects the sphere x2 + y2 + z2 – x + z – 2 = 0 in a circle of radius unity. Also find the equation of the sphere which has this circle for one of the great circles.
Solution. Given plane is x + 2y – z = 4 …..(1)
and given sphere is x2 + y2 + z2 – x + z – 2 = 0 …..(2)
Let C be the centre and a be the radius of (2)
∴ \(\mathrm{C}=\left(\frac{1}{2}, 0,-\frac{1}{2}\right) \text { and } a=\sqrt{\left(\frac{1}{4}+0+\frac{1}{4}+2\right)}=\sqrt{(5 / 2)}\)
Let M be the centre of the circle given by (1) and (2).
∴\(\mathrm{CM}=\left|\frac{\frac{1}{2}+2.0+\frac{1}{2}-4}{\sqrt{(1+4+1)}}\right|=\frac{3}{\sqrt{6}}\).
Let r be the radius of the circle.
⇒ \(\mathrm{CM}^2+r^2=a^2 \Rightarrow \frac{9}{6}+r^2=\frac{5}{2} \Rightarrow r=1\)
Let a sphere through the circle given by (1) and (2) be
x2 + y2 + z2 – x + z – 2 + λ(x + 2y – z – 4) = 0
i.e. x2 + y2 + z2 + (λ – 1)x + 2λy(1 – λ)z – 2 – 4λ= 0 …..(3)
Centre of (3) is \(\left(-\frac{\lambda-1}{2},-\lambda,-\frac{1-\lambda}{2}\right)\)
If the circle is a great circle then the centre of (3) must lie on (1).
∴ \(-\frac{\lambda-1}{2}-2 \lambda+\frac{1-\lambda}{2}=4 \Rightarrow \lambda=-1\)
∴ Equation to the required sphere is (from (3))
x2 + y2 + z2 – 2x – 2y + 2z + 2 = 0 …..(4)
Note. Centre of the great circle = centre of (4) = (1, 1, -1) and radius of great circle = radius of (4) = \(\sqrt{(1+1+1-2)}=1\)
Example.5. Show that the two circles x2 + y2 + z2 – y + 2z = 0, x – y + z = 2 …..(1) x2 + y2 + z2 + x – 3y + z – 5 = 0, 2x – y + 4z – 1 = 0 …..(2) lie on the same sphere and find its equation.
Solution. A sphere through the circle (1) is
x2 + y2 + z2 – y + 2z + λ(x – y + z – 2) = 0
i.e. x2 + y2 + z2 + λx – (1 + λ)y + (λ + 2)z – 2λ = 0 …..(3)
A sphere through the circle (2) is
x2 + y2 + z2 + x – 3y + z – 5 + µ(2x – y + 4z – 1) = 0
i.e. x2 + y2 + z2 + (2µ + 1)x – (3 – µ)y + (4µ + 1)z – 5 – µ = 0 …..(4)
But circles (1) and (2) lie on the same sphere.
(3) and (4) represent the same sphere
⇒ \(\left.\begin{array}{l}
\lambda+2=4 \mu+1 \\
-2 \lambda=-5-\mu
\end{array}\right\}\)
These two are satisfied by λ = 3, µ = 1.
∴ (3) and (4) represent the same sphere.
∴ Equation to the required sphere is x2 + y2 + z2 + 3x – 4y + 5z – 6 = 0.
Example.6. The circle x2 + y2 + z2 + 2x + 3y + 6 = 0 x – 2y + 4z – 9 = 0 and the centre of the sphere x2 + y2 + z2 – 2x + 4y – 6z + 5 = 0
Solution. Given circle is x2 + y2 + z2 + 2x + 3y + 6 = 0 = x – 2y + 4z – 9 = 0 …..(1)
any sphere through this circle will be of the form S + λπ = 0
(i.e.,) (x2 + y2 + z2 + 2x + 3y + 6) + λ(x – 2y + 4z – 9) = 0 …..(2)
where λ is a parameter.
Given sphere is x2 + y2 + z2 – 2x + 4y – 6z + 5 = 0 …..(3)
The centre = (1, -2, 3)
By data (2) passes through this point.
Substituting this point in (2), we get (1 + 4 + 9 + 2 – 6 + 6) + λ(1 + 4 + 12 – 9) = 0
⇒ 16 + 8λ = 0 ⇒ λ = -2
Substituting this value in (2), we get
(x2 + y2 + z2 + 2x + 3y + 6) – 2(x – 2y + 4z – 9) = 0
⇒ x2 + y2 + z2 + 7y – 8z + 24 = 0.
This is the required sphere.
Chapter 5 The Sphere Notation
S ≡ x2 + y2 + z2 + 2ux + 2vy + 2wz + d ≡ F(x, y, z)
S1 ≡ xx1 + yy1 + zz1 + u(x + x1) + v(y + y1) + w(z + z1) + d
S2 ≡ xx2 + yy2 + zz2 + u(x + x2) + v(y + y2) + w(z + z2) + d
S11 ≡ x12 + y12 + z12 + 2ux1 + 2vy1 + 2wz1 + d ≡ F(x1, y1, z1)
Chapter 5 The Sphere Intersection Of A Sphere And A Line
Let S ≡ x2 + y2 + z2 + 2ux + 2vy + 2wz + d = 0 be the equation to the sphere ξ with centre C = \(\bar{c}=(-u,-v,-w) \text { and radius }=a=\sqrt{u^2+v^2+w^2-d}\)
Let the equation to the sphere be
S ≡ x2 + y2 + z2 + 2ux + 2vy + 2wz + d = 0 …..(1) Let B = (α, β, γ)
Let the equation to the line be \(\frac{x-\alpha}{l}=\frac{y-\beta}{m}=\frac{z-\gamma}{n}=r\)
The coordinates of a point on the line which is at a distance r from (α, β, γ) are (α + lr, β + mr, γ + nr). If this point lies on the given sphere (1), then,
⇒ \((\alpha+l r)^2+(\beta+m r)^2+(\gamma+n r)^2+2 u(\alpha+l r)+2 v(\beta+m r)+2 w(\gamma+n r)+d-0\)
⇒ \(r^2\left(l^2+m^2+n^2\right)+2 r[l(\alpha+u)+m(\beta+v)+n(r+w)]+\)
⇒ \(\left(\alpha^2+\beta^2+\gamma^2+2 u \alpha+2 v \beta+2 w \gamma+d\right)=0\) …..(3)
This quadratic equation in r gives two values of r Viz. r1 and r2 corresponding to which we get two points common to the sphere and the line. Therefore, a line meets a sphere always in two points. These points may be real, coincident or imaginary. These are
P(α + lr1, β + mr1, γ + nr1), Q(α + lr2, β + mr2, γ + nr2)
Let the points P, Q are coincident at T.
Note. \(B P \cdot B Q=\left|S_{11}\right| \text { and } B T^2=\left|S_{11}\right| \Rightarrow B P \cdot P Q=B T^2 \text {. }\)
Chapter 5 The Sphere Definition. If line L through a given point B has only one common point T with a given sphere, then L \((=\overleftrightarrow{B T})\) is called a tangent line to the sphere from B. T is called the point of contact of the tangent line \(\overleftrightarrow{B T}\) with the sphere. \(\overleftrightarrow{B T}\) is said to touch the sphere at T and is called a tangent line to the sphere at T.
Also if C is the centre of the sphere, then \(\overleftrightarrow{\mathrm{CT}} \perp \overleftrightarrow{\mathrm{BT}}\) i.e. line joining the point of contact to the centre of the sphere, is perpendicular to the tangent line.
Definition. B is a point and ξ is a sphere with centre C and radius a.
(1) If BC > a, we say that B is an external point to the sphere ξ and the set of points B such that BC > a is called the exterior of the sphere ξ.
(2) If BC < a, we say that B is an internal point to the sphere ξ and the set of points B such that BC < a is called the interior of the sphere ξ.
Let B = \(\bar{b}=\left(x_1, y_1, z_1\right)\). Let the sphere ξ be S = 0.
B is an external point to the sphere ξ.
⇒ \(\mathrm{BC}>a \Leftrightarrow|\bar{c}-\bar{b}|>a\) \((\bar{c}-\bar{b})^2>a^2\)
⇒ \(\bar{b}^2-2 \bar{b} \cdot \bar{c}+\bar{c}^2-a^2>0\) <=> \(F(\bar{b})>0 \quad \Leftrightarrow S_{11}>0\).
B is an internal point to the sphere ξ <=> S11 < 0.
Except for the point of contact, all other points on a tangent line belong to the exterior of the sphere.
For, the distance of every point on the tangent line from the centre is greater than or equal to the radius.
Also, a tangent line to a sphere does not pass through an interior point.
Definition. If a line through B intersects a sphere ξ in two distinct points P and Q, then PQ is called a chord of the sphere and \(\overleftrightarrow{\mathrm{PQ}}\) is called a second line of the sphere ξ.
Note. r is the radius and C is the centre of the sphere ξ. The distance of C from the chord PQ is d. Then length of PQ is \(2 \sqrt{r^2-d^2}\).
Chapter 5 The Sphere Length Of The Tangent Line From A Point
From an external point B to a sphere ξ, always there exists a tangent line through B to the sphere ξ.
Through B by taking different directions (d.cs.) we can draw infinitely many tangent lines to the sphere.
Definition. If \(\overleftrightarrow{\mathrm{BT}}\) is a tangent line from an external point B to a sphere touches the sphere at T, then BT is called the length of the tangent line to the sphere from B.
If B = (x1, y1, z1), we know that \(\mathrm{BT}^2=\left|\mathrm{S}_{11}\right|\).
∴ Length of the tangent line from B(x1, y1, z1) to the sphere \(\sqrt{\left[\mathrm{S}_{11}\right]}\)
Note. From an internal point of a sphere, there exists no tangent line to the sphere.
Definition. Normal.
Let S be the sphere and P be a point on S. Then the line through P and perpendicular to the tangent line to S at the point is called The normal to the sphere S at P. The point P is called the foot of the normal at P.
Theorem.9. The locus of the tangent line at a point on a sphere of non-zero radius is a plane.
Proof. Let the equation to the sphere be
S ≡ x2 + y2 + z2 + 2ux + 2vy + 2wz + d = 0 …..(1)
Let B = (x1, y1, z1) be a point on it.
Equations of any line through B are \(\frac{x-x_1}{l}=\frac{y-y_1}{m}=\frac{z-z_1}{n}=r\) …..(2)
Any point on (2) at a distance r from (x1, y1, z1) is (x1 + lr, y1 + mr, z1 + nr)
If this point lies on (1), we get (x1 + lr)2 + (y1 + mr)2 + (z1 + nr)2 + 2u(x1 + lr) + 2v(y1 + mr) + 2w(z1 + nr) + d = 0
⇒ r2 (l2 + m2 + n2) + 2r[l(x1 + u) + m(y1 + v) + n(z1 + w)] + (x12 + y12 + z12 + 2ux1 + 2vy1 + 2wz1 +d) = 0 …..(3)
Since B(x1, y1, z1) ∈ (1) we have x12 + y12 + z12 + 2ux1 + 2vy1 + 2wz1 +d = 0
⇒ one root of (3) is zero.
Now (3) ⇒ r(l2 + m2 + n2) + 2[l(x1 + u) + m(y1 + v) + n(z1 + w)]
If (2) is a tangent line to the sphere (1) then the points of intersection of (1) and (2) should coincide with (x1, y1, z1).
⇒ The second root of (3) should also be zero.
⇒ l(x1 + u) + m(y1 + v) + n(z1 + w) = 0 …..(6)
⇒ Eliminating l, m, n from equations (2) and (6) we have (x – x1)(x1 + u) + (y – y1)(y1 + v) + (z – z1)(z1 + w) = 0
⇒ xx1 + yy1 + zz1 + ux + vy +wz – ux1 – vy1 – wz1 – (x12 + y12 + z12) = 0
⇒ xx1 + yy1 + zz1 + u(x + x1) + v(y + y1) + w(z + z1) + d = 0 …..(7)
since x12 + y12 + z12 + 2ux1 + 2vy1 + 2wz1 + d = 0.
Equation (7) is a plane which gives the required locus.
∴ All the tangent lines at B pass through B and a plane having BC as its normal.
Chapter 5 The Sphere Tangent Plane
Definition. The locus of the tangent lines at a point B on a sphere ξ of non-zero radius is a plane called the tangent plane to the sphere ξ at B. B is called the point of contact of the plane with the sphere ξ.
Theorem.10. Equation to the tangent plane to the sphere S = 0 at (x1, y1, z1) on the sphere is x(x1 + u) + y(y1 + v) + z(z1 + w) + ux1 + vy1 + wz1 + d = 0.
Proof. We here proved in theorem vide that the locus of the tangent lines at a point B(x1, y1, z1) is a plane. This plane is defined as the tangent plant at B and we have proved that the equation to this plane is
xx1 + yy1 + zz1 + u(x + x1) + v(y + y1) + w(z + z1) + d = 0
This is the required equation to the tangent plane at (x1, y1, z1).
Note 1. The Tangent Plane at B is perpendicular to BC.
2. The line through B and perpendicular to the tangent plane at B is called the normal line to the sphere at B. The normal line at B passes through the centre C.
3. The perpendicular distance of any tangent line from centre C is equal to the radius a.
4. The perpendicular distance of any tangent line from C is equal to a.
5. If lx + my + nz = p is the tangent plane, then
⇒ \(\left|\frac{l(-u)+m(-v)+n(-w)-p}{\sqrt{l^2+m^2+n^2}}\right|=\sqrt{u^2+v^2+w^2-d}\)
i.e. (lu + mv + nw + p)2 = (l2 + m2 + n2)(u2 + v2 + w2 – d)
6. Except the point of contact all the other points on the tangent plane belong to the exterior of the sphere.
7. If B is a point in the exterior of the sphere ξ, then there exists a tangent plane to ξ through B.
8. ξ is a sphere and π is a plane.
ξ, π have only one point in common <=> π is a tangent plane to ξ.
example. The equation to the sphere with centre at (1, -2, 3) and touching the plane 6x + 3y + 2z = 4 is
⇒ \((x-1)^2+(y+2)^2+(z-3)^2=\left|\frac{6(1)-3(-2)+2(3)-4}{\sqrt{36+9+4}}\right|\)
⇒ x2 + y2 + z2 – 2x + 4y – 6z + 12 = 0.
Chapter 5 The Sphere Touching Spheres
Definition. ξ, ξ’ are two spheres with only one point P in common. Then ξ, ξ; are said to touch at P. ξ, ξ’ are called touching spheres and P is called the point of contact of the sphere ξ, ξ’.
The tangent plane at P to ξ is equal to the tangent plane at P to ξ’. This plane is called the common tangent plane at p to ξ, ξ’.
If A, B are the centres of ξ, ξ’ respectively, then A, P, B are collinear.
Theorem.11. S = 0, S’ = 0 are the equations of two spheres touching at P. Then the equation to the common tangent plane at P to the two spheres is S – S’ = 0.
Proof. S = 0 and S’ = 0 are two spheres with one and only one common point P.
∴ Their centres are not equal i.e. (-u, -v, -w) ≠ (-u’, -v’, -w)
i.e. (u – u’, v – v’, w – w’) ≠ (0, 0, 0).
Now S – S’ ≡ 2(u – u’)x + 2(v – v’)y + 2(w – w’)z + (d – d’) = 0 is a plane to which all the points common to the spheres S = 0, S’ = 0 belong. But S = 0, S’ = 0 have only one point P in common.
∴ P is the only point common to S = 0, S’ = 0 and which lies on the plane S – S’ = 0.
∴ S – S’ = 0 is the tangent plane at P to S as well as to S’ = 0.
∴ S – S’ = 0 is the common tangent plane at P to the spheres S = 0, S’ = 0.
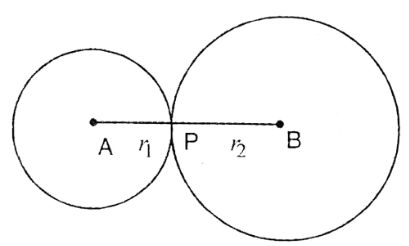
Chapter 5 The Sphere Definition. A, B are the centres and r1(>0).r2(>0) are the radii of two spheres ξ, ξ’ touching at P.
(1) If A – P – B, the spheres are said to touch externally at P.
(2) If A – P – B or B – A – P, the spheres are said to touch internally at P.
We have AB = r1 + r2 ⇒ spheres ξ, ξ’ touch externally at P.
Further, P is an internal point to AB and (P; A, B) = r1 : r2
Again we have, \(\mathrm{AB}=\left|r_1-r_2\right|\) ⇒ spheres ξ, ξ’ to touch internally at P.
Further, P is an internal point to AB and (P; A, B) = r1 : -r2.
Chapter 5 The Sphere Solved Problems
Example.1. Find whether the points P = (3, 1, -1), Q = (2, -3, 1), R = (1, -2, 0) belong to the exterior of ξ or to the interior of ξ or to ξ where ξ is the sphere x2 + y2 + z2 – 3x + 5y + 7 = 0.
Solution. Let the equation to the sphere ξ be S = 0 where
S ≡ x2 + y2 + z2 – 3x + 5y + 7
P = (3, 1, -1). In this case S11 = 9 + 1 + 1 – 9 + 5 + 7 = 14 > 0
∴ P belongs to the exterior of ξ.
Q = (2, -3, 1). In this case S11 = 4 + 9 + 1 – 6 – 15 + 7 = 0.
∴ Q ∈ ξ
R = (1, -2, 0). In this case S11 = 1 + 4 + 0 – 3 – 10 + 7 = -1 < 0.
∴ R belongs to the interior of ξ.
Example.2. Find the length of the tangent line from the point (3, 1, -1) to the spheres x2 + y2 + z2 – 3x + 5y + 7 = 0.
Solution. If P = (x1, y1, z1) and S = 0 is a sphere, then the length of the tangent from P to the sphere is \(\sqrt{S_{11}}\).
∴ Length of the tangent from (3, 1, -1) to the sphere
x2 + y2 + z2 – 3x + 5y + 7 = 0 is \(\sqrt{9+1+1-9+5+7}=\sqrt{14}\).
Example.3. Find the points of intersection of the line \(\frac{x-8}{4}=\frac{y}{1}=-(z-1)\) and the sphere x2 + y2 + z2 – 4x + 6y – 2z + 5 = 0.
Solution. Let any point on the given line be (4t + 8, t, 1 – t).
If it belongs to the sphere x2 + y2 + z2 – 4x + 6y – 2z + 5 = 0, then
(4t + 8)2 + t2 + (1 – t)2 – 4(4t + 8) + 6t – 2(1 – t) + 5 = 0
i.e. t2 + 3t + 2 = 0 i.e. t = -1, -2.
∴ The points of intersection of the line with the spheres are (4, -1, 2), (0, -2, 3).
Example.4. Show that the plane 2x – 2y + z + 12 = 0 touches the sphere x2 + y2 + z2 – 2x – 4y + 2z – 3 = 0 and find the point of contact.
Solution. Given sphere is x2 + y2 + z2 – 2x – 4y + 2z – 3 = 0 …..(1)
Its centre = (1, 2, -1) and radius = \(\sqrt{1+4+1+3}=3\)
Given plane is 2x – 2y + z + 12 = 0 …..()
Distance of (1, 2, -1) from (2) = \(\left|\frac{2(1)-2(2)+1(-1)+12}{\sqrt{4+4+1}}\right|=3=\text { radius }\).
∴ The plane touches the sphere.
Let the line through the centre and perpendicular to (2) be
⇒ \(\frac{x-1}{2}=\frac{y-2}{-2}=\frac{z+1}{1}(=r \text { say) }\)
A point on this line is (2r + 1, -2r + 2, r – 1).
If it is the point of contact of (2) with (1), then this point must lie on (2).
∴ 2(2r + 1) – 2(-2r + 2) + (r – 1) + 12 = 0 ⇒ r = -1
∴ Point of contact = (-1, 4, -2).
Example.5. Find the equation of the sphere which touches the sphere x2 + y2 + z2 + 2x – 6y + 1 = 0 at the point (1, 2, -2) and passes through the origin.
Solution. Let S ≡ x2 + y2 + z2 + 2x – 6y + 1 = 0 and P = (1, 2, -2)
∴ Equation to the tangent plane (s1 = 0) at P is
1.x + 2.y + (-2)z + x + 1 – 3y – 3.2 + 1 = 0 i.e. 2x – y – 2z – 4 = 0
Let the sphere touching the spheres S = 0 at P and passing through the origin be
x2 + y2 + z2 + 2x – 6y + 1 + λ(2x – y – 2z – 4) = 0 …..(1)
∴ 0 + 0 + 0 + 0 – 0 + 1 + λ(0 – 0 – 0 – 4) = 0 ⇒ λ = 1/4
∴ The equation to the required sphere is
4(x2 + y2 + z2) + 10x – 25y – 2z = 0 [from(1)]
Since (0, 0, 0) belong to the exterior of S = 0, the required sphere touches S = 0 externally at (1, 2, -2).
Note. Even if (0, 0, 0) belongs to the interior of S = 0, the same method can be applied to find the touching sphere which touches internally.
Example.6. Find the equations of the tangent line to the circle x2 + y2 + z2 + 5x – 7y + 2z – 8 = 0, 3x – 2y + 4z + 3 = 0 at the point (-3, 5, 4).
Solution. The tangent line to a circle is the line of intersection of the tangent plane to the sphere at the given point and the plane of the circle.
Given sphere is x2 + y2 + z2 + 5x – 7y + 2z – 8 = 0 …..(1)
and plane of the circle is 3x – 2y + 4z + 3 = 0 …..(2)
∴ The equation to the tangent plane to (1) at (-3, 5, 4) is
⇒ \(x(-3)+y(5)+z(4)+\frac{5}{2} x+\frac{5}{2}(-3)-\frac{7}{2} y-\frac{7}{2}(5)+z+4-8=0\)
i.e. x – 3y – 10z + 58 = 0 …..(3)
∴ Equations to the tangent line can be put in the symmetrical form
\(\frac{x+3}{32}=\frac{y-5}{34}=\frac{z-4}{-7}\).
Example.7. Find the equations of the tangent planes to the sphere x2 + y2 + z2 + 2x – 4y + 6z – 7 = 0 which intersect in the line 6x – 3y – 23 = 0 = 3z + 2.
Solution. Let the plane through the line 6x – 3y – 23 = 0 = 3z + 2 and touching the sphere x2 + y2 + z2 + 2x – 4y + 6z – 7 = 0 be
6x – 3y – 23 + λ(3z + 2) = 0 i.e. 6x – 3y + 3λz + 2λ – 23 = 0
∴ =\(\left|\frac{6(-1)-3(2)+3 \lambda(-3)+2 \lambda-23}{\sqrt{\left(36+9+9 \lambda^2\right)}}\right|=\sqrt{(21)}\)
⇒ \(2 \lambda^2-8 \lambda-4=0 \Rightarrow \lambda=4,-\frac{1}{2}\)
∴ Required tangent planes are 2x – y + 4z – 5 = 0, 4x – 2y – z – 16 = 0.
Example.8. (1) Find the equations of spheres touching the coordinate planes. How many such spheres can be had?
(2) Find the equations of the spheres touching the three coordinate axes. How many such spheres can be had?
Solution. (1) Let a sphere touching the coordinate planes be
x2 + y2 + z2 + 2ux + 2vy + 2wz + d = 0 (d > 0) …..(1)
(1) touches the YZ plane i.e. x = 0 \(\Rightarrow\left|\frac{-u}{1}\right|=\sqrt{u^2+v^2+w^2-d}\)
⇒ v2 + w2 = d …..(2)
Similarly, w2 + u2 = d …..(3) u2 + v2 = d …..(4)
∴ (2) + (3) + (4) ⇒ \(u^2+v^2+w^2=\frac{3 d}{2}\)
∴\(u^2=\frac{d}{2}, v^2=\frac{d}{2}, w^2=\frac{d}{2} \quad \text { i.e. } u=\pm \sqrt{\frac{d}{2}}=v=w\)
∴ From (1), equations, of the spheres touching the coordinate planes are
\(x^2+y^2+z^2 \pm \sqrt{(2 d)} x \pm \sqrt{(2 d)} y \pm \sqrt{(2 d)} z+d=0\) …..(1)
(1) touches the x-axis i.e. y = 0, z = 0 at points whose x-coordinates are given by x2 + 2ux + d = 0 i.e. 4u2 – 4d = 0 (∵ (1) is touching) i.e. u2 = d.
Similarly v2 = d, w2 = d.
∴ \(u=v=w=\pm \sqrt{d}\).
∴ From (1), equations of the sphere touching the coordinate axes are
⇒ \(x^2+y^2+z^2 \pm 2 \sqrt{d} x \pm 2 \sqrt{d} y \pm 2 \sqrt{d} z+d=0\).
Since d > 0, there exists an infinite number of spheres touching the coordinate axes.
However, for a given d > 0, there exist only eight spheres touching the coordinate axes.
Example.9. A sphere is inscribed in the tetrahedron with faces x = 0, y = 0, z = 0, 2x + 6y + 3z = 14. Find the equation of the sphere.
Solution.
Given
A sphere is inscribed in the tetrahedron with faces x = 0, y = 0, z = 0, 2x + 6y + 3z = 14
The plane 2x + 6y + 3z = 14 meets the axes in
(7, 0, 0), (0, 7/3, 0), (0, 0, 14/3).
Let the equation to the inscribed sphere becomes
⇒ \(x^2+y^2+z^2-2 \sqrt{\frac{d}{2}} x-2 \sqrt{\frac{d}{2}} y-2 \sqrt{\frac{d}{2}} z+d=0, d>0\)
such that \(\sqrt{\frac{d}{2}}<\frac{7}{3}\left(\text { smaller of } 7, \frac{7}{3}, \frac{14}{3}\right)\)
Its centre = \(\left(\sqrt{\frac{d}{2}}, \sqrt{\frac{d}{2}}, \sqrt{\frac{d}{2}}\right) \text { and radius }=\sqrt{\left(\frac{d}{2}+\frac{d}{2}+\frac{d}{2}-d\right)}=\sqrt{\left(\frac{d}{2}\right)}\)
Let \(\sqrt{\frac{d}{2}}=k \text { say }\)
∴ \(\left|\frac{2 k+6 k+3 k-14}{\sqrt{(4+36+9)}}\right|=k \Rightarrow(11 k-14)^2=49 k^2 \Rightarrow 18 k^2-77 k+49=0\)
⇒ \(k=\frac{7}{9}, \frac{7}{2} \quad \text { Since } k=\sqrt{\left(\frac{d}{2}\right)}<\frac{7}{3}, k=\frac{7}{9} \text { only }\)
∴ Centre = \(\left(\frac{7}{9}, \frac{7}{9}, \frac{7}{9}\right) \text { and radius }=\frac{7}{9}\). Also \(\sqrt{\frac{d}{2}}=\frac{7}{9} \text { i.e. } d=\frac{98}{81}\)
∴ Equation to the inscribed sphere is \(x^2+y^2+z^2-\frac{14}{9}(x+y+z)+\frac{98}{81}=0\).
Example.10. Show that the centres of the spheres which touch the lines y = mx, z = c, y = -mx, z = -c lie upon the surface mxy + cz(1 + m2) = 0.
Solution. Given lines are y = mx, z = c …..(1) y = -mx, z = -c …..(2)
(1) can be written as \(\frac{x-0}{1}=\frac{y-0}{m}, z-c=0 \text { and }\)
(2) can be written as \(\frac{x-0}{1}=\frac{y-0}{-m}, z-(-c)=0\).
Let (α, β, γ) be the centre of the sphere which touches the lines (1) and (2). Sphere touches lines (1) and (2) <=> (α, β, γ) is equidistance from the lines (1) and (2).
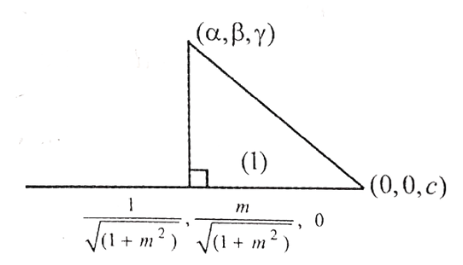
⇒ \(\left|(\alpha, \beta, \gamma-c) \times\left(\frac{1}{\sqrt{\left(1+m^2\right)}}, \frac{m}{\sqrt{\left(1+m^2\right)}}, 0\right)\right|\)
= \(\left|(\alpha, \beta, \gamma-c) \times\left(\frac{1}{\sqrt{\left(1+m^2\right)}}, \frac{-m}{\sqrt{\left(1+m^2\right)}}, 0\right)\right|\)
⇒ \(\frac{1}{\sqrt{1+m^2}}|(\alpha, \beta, \gamma-c) \times(1, m, 0)|\)
⇒ \(|-m(\gamma-c), \gamma-c, \alpha m-\beta|=|(m(\gamma+c) \gamma+c,-\alpha m-\beta)|\)
⇒ 4cm2γ + 4cγ + 4mαβ = 0 <=> (m2 + 1)cγ + mαβ = 0
∴ (α, β, γ) lies on the surface (m2 + 1)cz + mxy = 0.
Example.11. Find the locus of the middle points of the system of parallel chords of the spheres x2 + y2 + z2 + 2ux + 2vy + 2wz + d = 0.
Solution. Let l, m, n be d.cs. of the system of parallel chords of the sphere and (x1, y1, z1) be the middle point of a chord of the system.
chord with the middle point (x1, y1, z1) intersects the sphere in the points (x1 + lr, y1 + mr, z1 + nr).
⇒ (x1 + lr)2 + (y1 + mr)2 + (z1 + nr)2 + 2u(x1 + lr) + 2v(y1 + mr) + 2w(z1 + nr)+ d = 0
⇒ r2(l2 + m2 + n2) + 2[(l(u + x1) + m(v + y1) + n(w + z1)] + s11 = 0
⇒ Sum of the two values of r is zero.
⇒ l(u + x1) + m(v + y1) + n(w + z1) = 0
∴ Locus of the middle points of the system of parallel chords of S = 0 is l(u + x) + m(v + y) + n(w + z) = 0.
Example.12. Show that the spheres x2 + y2 + z2 – 2x – 4y – 6z – 50 = 0, x2 + y2 + z2 – 10x + 2y + 18z + 82 = 0 touch externally at the point \(\left(\frac{45}{13}, \frac{2}{13}, \frac{-57}{13}\right)\).
Solution. Let A, B be the centres and r1, r2 be the radii of the two spheres.
∴ A = (1, 2, 3), B = (5, -1, -9),
⇒ \(r_1=\sqrt{(1+4+9+50)}=8\),
⇒ \(r_2=\sqrt{(25+1+81-82)}=5\).
Now \(A B=\sqrt{\left(4^2+3^2+12^2\right)}=13\)
∴ AB = r1 + r2
∴ The two spheres touch externally, say, at P.
∴ (P; A, B) = r1 : r2 = 8 : 5
∴ \(\mathrm{P}=\left(\frac{45}{13}, \frac{2}{13}, \frac{-57}{13}\right)\)
Chapter 5 The Sphere Plane Of Contact Definition. Through an external point, B planes are drawn touching a sphere. The locus of contact of the tangent planes of the sphere is a plane, called the plane of contact of the point B w.r.t the sphere. If B is a point on the sphere, then the tangent plane at B to the sphere is called the plane of contact of B w.r.t the sphere.
Theorem.12. Equation of the plane of contact of the point (x1, y1, z1) w.r.t the sphere S = 0 of non-zero radius is s1 =0.
Proof. Let S ≡ x2 + y2 + z2 + 2ux + 2vy + 2wz + d = 0 be the equation to the sphere ξ with centre C = \(\bar{c}=(-u,-v,-w)\) and
radius = a(> 0) = \(\sqrt{u^2+v^2+w^2-d}\)
Let B = (x1, y1, z1).
Equation to the tangent plane at T (α, β, γ) is
x(α + u) + y(β + v) + z(γ + w) + uα + vβ + wγ + d = 0.
If this passes through the point B.
x1(α + u) + y1(β + v) + z1(γ + w) + uα + vβ + wγ + d = 0 which is the condition for the point (α, β, γ) to lie on the plane.
x1(x + u) + y1(y + v) + z1(z + w) + ux + vy + wz + d = 0 ⇒ s1 = 0
This is the equation to the plane of contact of the point (x1, y1, z1) i.e. s1 = 0
Note 1. Plane of contact is perpendicular to the line joining the given point with the centre of the sphere.
2. The locus of points of contact is the circle in which the plane of contact cuts the sphere.
3. The plane of contact of any point w.r.t a sphere does not pass through the centre of the sphere.
4. If B is an interior point to sphere S = 0, there does not exist plane of contact of B w.r.t. S = 0.
5. From now on we take spheres which are not point spheres unless otherwise stated.
example. The plane of contact of the point (3, 1, -1) w.r.t the sphere
2(x2 + y2 + z2) – 6x + 10y + 7 = 0 is
⇒ \(x \cdot 3+y \cdot 1+z(-1)-\frac{3}{2}(x+3)+\frac{5}{2}(y+1)+\frac{7}{2}=0 \text { i.e. } 3 x+7 y-2 z+3=0\).
Chapter 5 The Sphere Polar Plane, Pole Of The Polar Plane
Definition. ξ is a sphere and B is a point. The locus of the points, so that the plane of contact of each point w.r.t ξ passes through B, is a plane called the polar plane of B w.r.t ξ. B is called the pole of the polar plane.
Theorem.13. The equation to the polar plane of the point (x1, y1, z1) w.r.t the sphere S = 0 is s1 = 0.
Proof. Let S ≡ x2 + y2 + z2 + 2ux + 2vy + 2wz + d = 0 be the equation to the sphere with
center C = \(\bar{c}=(-u,-v,-w) \text { and radius }=a=\sqrt{u^2+v^2+w^2-d}\)
Let B = (x1, y1, z1)
Let P = (α, β, γ) be a point so that its plane of contact w.r.t the sphere S = 0 passes through B.
Plane of contact of P is α(x + u) + β(y + v) + γ(z + w) + ux + vy + wz + d = 0
this passes through B
⇒ α(x1 + u) + β(y1 + v) + γ(z1 + w) + (ux1 + vy1 + wz1 + d) = 0
⇒ Locus of P is
x(x1 + u) + y(y1 + v) + z(z1 + w) + (ux1 + vy1 + wz1 + d) = 0
But be def. the locus of P is the polar plane of B.
∴ Equation to the polar plane of B is
xx1 + yy1 + zz1 + u(x + x1) + v(y + y1) + w(z + z1) + d = 0 ⇒ S1 = 0
Note 1. If B lies on the sphere, then the polar plane of B is tangent plane at B to the sphere. If B is exterior to the sphere the polar plane of B w.r.t the sphere is the plane of contact of B w.r.t the sphere.
2. Polar plane of B is perpendicular to CB since d.rs. of \(\overleftrightarrow{\mathrm{CB}}\) are
x1 + u, y1 + v, z1 + w.
example. The polar plane of the point (1, 3, 4) w.r.t the sphere
x2 + y2 + z2 – 6x – 2z + 5 = 0 is
x.1 + y.3 + z.4 – 3(x + 1) – (z + 4) + 5 = 0
i.e. 2x – 3y + 3z + 2 = 0.
Theorem.14. ξ is a sphere. A lies on the polar plane of B w.r.t ξ if and only if B lies on the polar plane A w.r.t ξ.
Proof. Let S = x2 + y2 + z2 + 2ux + 2vy + 2wz + d = 0 …..(1)
be the equation to the sphere.
Let A(x1, y1, z1) and B(x2, y2, z2).
The polar plane of A is
xx1 + yy1 + zz1 + u(x + x1) + v(y + y1) + w(z + z1) + d = 0 …..(2)
If this passes through B(x2, y2, z2) then
x1x2 + y1y2 + z1z2 + u(x1 + x2) + v(y1 + y2) + w(z1 + z2) + d = 0 …..(3)
Evidently, this is the condition for the plane of B to pass through A.
⇒ A lies on the polar plane of B.
Note. If S = 0 is the equation to ξ and \(\mathrm{A}=\bar{a}=\left(x_1, y_1, z_1\right), \mathrm{B}=\bar{b}=\left(x_2, y_2, z_2\right)\), then the condition for A to lie in the polar plane of B is (x2, y2, z2).(x1, y1, z1).(-u, -v, -w) + (-u, -v, -w).(-u, -v, -w) – a2 = 0
i.e. x1x2 + y1y2 + z1z2 + u(x1 + x2) + v(y1 + y2) + w(z1 + z2) + u2 + v2 + w2 – a2 = 0
If S ≡ x2 + y2 + z2 – a2 = 0, then the condition for a to lie on the polar plane of B is x1x2 + y1y2 + z1z2 = a2.
Chapter 5 The Sphere Conjugate Points, Conjugate Planes
Definition. ξ is a sphere. If A, B are two points such that the polar plane of B w.r.t ξ passes through A, then A, B are called conjugate points w.r.t ξ.
The polar planes of A and B are called conjugate planes.
example. The polar plane of the point P(1, -1, 2) w.r.t the sphere.
x2 + y2 + z2 – 9 = 0 is x.1 + y.(-1) + z.2 – 9 = 0
i.e. x – y + 2z – 9 = 0 …..(1)
The polar plane of the point Q(5, 2, 3) w.r.t the sphere
x2 + y2 + z2 – 9 = 0 is x.5 + y.2 + z.3 – 9 = 0
i.e. 5x + 2y + 3z – 9 = 0 …..(2)
Clearly, the polar plane of P passes through Q and the polar plane of Q passes through P. Thus P, Q are conjugate points. Also, the polar planes (1) and (2) are conjugate planes.
Theorem.15. If x2 + y2 + z2 – a2 = 0 is a sphere, then the pole of the plane lx + my + nz = p (p ≠ 0) is \(\left(\frac{a^2 l}{p}, \frac{a^2 m}{p}, \frac{a^2 n}{p}\right)\)
Proof. Let P(x1, y1, z1) be the pole of the plane lx + my + nz – p = 0 …..(1)
w.r.t the sphere S = 0.
∴ polar plane of P w.r.t S = 0 is S1 = 0 i.e. xx1 + yy1 + zz1 – a2 = 0 …..(2)
Since (1) and (2) represent the same polar plane x1 : l = y1 : m = z1 : n = a2 = 0
⇒ \(x_1=\frac{l a^2}{p}, y_1=\frac{m a^2}{p}, z_1=\frac{n a^2}{p}(p \neq 0) . \quad \mathrm{P}=\left(\frac{a^2 l}{p}, \frac{a^2 m}{p}, \frac{a^2 n}{p}\right)\)
Note. It the line \(\overleftrightarrow{\mathrm{OP}}\) intersects the polar plane of P at Q, then OP.OQ = a2.
For: polar plane of P(x1, y1, z1) w.r.t S = 0 is xx1 + yy1 + zz1 – a2 = 0
and the polar plane is perpendicular to \(\overleftrightarrow{\mathrm{OP}}\).
∴ Distance of O from the polar plane of P
= \(\mathrm{OQ}=\left|\frac{-a^2}{\sqrt{x_1^2+y_1^2+z_1^2}}\right|=\frac{a^2}{\mathrm{OP}} \text { since } \mathrm{OP}=\sqrt{x_1^2+y_1^2+z_1^2}\)
∴ OP . OQ = a2
Observe that if P is interior (exterior) to the sphere then Q is exterior (interior) to the sphere.
Theorem.16. S ≡ x2 + y2 + z2 – a2 = 0 is a sphere. If l1x + m1y + n1z = p1 (≠0) …..(1), l2x + m2y + n2z = p2(≠ 0) …..(2) are conjugate planes w.r.t S = 0, then a2(l1l2 + m1m2 + n1n2) = p1p2.
Proof. Pole of (1) w.r.t S = 0 is \(\left(\frac{a^2 l_1}{p_1}, \frac{a^2 m_1}{p_1}, \frac{a^2 n_1}{p_1}\right)\). But this point lies on (2).
∴ \(\frac{l_2 a^2 l_1^{-}}{p_1}+\frac{m_2 a^2 m_1}{p_1}+\frac{n_2 a^2 n_1}{p_1}=p_2 \Rightarrow a^2\left(l_1 l_2+m_1 m_2+n_1 n_2\right)=p_1 p_2\)
example. Prove that the planes 5x – y – 6z + 25 = 0 …..(1)
x – 2y – 3z + 25 = 0 …..(2)
and conjugate planes w.r.t the sphere x2 + y2 + z2 = 25 …..(3)
Solution. Let the pole of (1) be P(x1, y1, z1) w.r.t (3)
∴ polar plane of P w.r.t (3) is xx1 + yy1 + zz1 – 25 = 0 …..(4)
Since (4) and (1) represent the same plane,
⇒ \(\frac{x_1}{5}=\frac{y_1}{-1}=\frac{z_1}{-6}=\frac{-25}{25} \Rightarrow \mathrm{P}\left(x_1, y_1, z_1\right)=(-5,1,6)\)
Clearly, P lies on (2).
Similarly the pole of (2) w.r.t (3) can be obtained as Q(-1, 2, 3).
Clearly, Q lies on (1).
∴ Planes (1) and (2) are conjugate w.r.t. the sphere (3).
Theorem.17. S = 0 is a sphere. Then the polar planes of all points on the line L (not passing through C) w.r.t. S = 0 pass through another line L’.
Proof. Let S ≡ x2 + y2 + z2 – a2 = 0 be the given sphere.
Let the equation to L be \(\frac{x-x_1}{l}=\frac{y-y_1}{m}=\frac{z-z_1}{n}=t \text { (say) }\)
∴ Any point P on L is (x1 + lt, y1 + mt, z1 + nt).
∴ Equation to the polar plane of P w.r.t. S = 0 is x(x1 + lt) + y(y1 + mt) + z(z1 + nt) – a2 = 0
i.e. (x1x + y1y + z1z – a2) + t(lx + my + nz) = 0
∴ The polar plane of any point on L w.r.t S = 0 passes through the line L’ of intersection of the planes x1x + y1y + z1z = a2, lx + my + nz = 0 …..(1)
(The two planes are not parallel since L is not passing through the origin).
Note 1. The polar plane of any point P on L passes through every point of L’. So the polar plane of every point of L’, passes through the point P on L. As P can be any point on L, the polar plane of every point of L’ passes through L.
2. D.rs. (1) are (ny1 – mz1, lz1 – nx1, mx1 – ly1).
Since l(ny1 – mz1) + m(lz1 – nx1) + n(mx1 – ly1) = 0 the line L is perpendicular to its polar line L’.
Chapter 5 The Sphere Conjugate Lines Or Polar Lines
Definition. ξ is a sphere L, L’ are two lines such that the polar plane of every point on L w.r.t. ξ passes through L’, then, L, L’ are called conjugate lines. Some authors called L, L’ as polar lines.
Chapter 5 The Sphere Solved Problems
Example.1. Find the pole of the plane x + 2y + 3z = 7 w.r.t the sphere x2 + y2 + z2 – 2x – 4y – 6z + 11 = 0.
Solution. Given plane is x + 2y + 3z – 7 = 0 …..(1)
Let P(x1, y1, z1) be the pole of (1) w.r.t. the sphere
x2 + y2 + z2 – 2x – 4y – 6z + 11 = 0 …..(2)
polar plane of P(x1, y1, z1) w.r.t. (2) is
xx1 + yy1 + zz1 – (x + x1) – 2(y + y1) – 3(z + z1) + 11 = 0
⇒ x(x1 – 1) + y(y1 – 2) + z(z1 – 3) – (x1 + 2y1 + 3z1 – 11) = 0 …..(3)
Since (1) and (2) represent the same polar plane,
\(\frac{x_1-1}{1}=\frac{y_1-2}{2}=\frac{z_1-3}{3}=\frac{\left(x_1+2 y_1+3 z_1-11\right)}{7}=t \text { (say) }\)(x1, y1, z1) = (t + 1, 2t + 2, 3t + 3) and x1 + 2y1 + 3z1 – 11 = 7t
⇒ (t + 1 + 4t + 4 + 9t + 9 – 11) = 7t ⇒ 7t = -3 ⇒ t = -3/7
⇒ Pole of (1) = (x1, y1, z1) = \(\left(+\frac{4}{7}, \frac{8}{7}, \frac{12}{7}\right)\)
Example.2. Show that the planes of contact of all points on the line \(\frac{x}{2}=\frac{y-a}{3}=\frac{z+3 a}{4}\) w.r.t. the sphere x2 + y2 + z2 = a2 pass through the line \(\frac{2 x+3 a}{-13}=\frac{y-a}{3}=\frac{z}{1}\).
Solution. Given line is \(\frac{x}{2}=\frac{y-a}{3}=\frac{z+3 a}{4}(=r \text { say })\) …..(1)
and given sphere is x2 + y2 + z2 = a2 …..(2)
Let \(\frac{2 x+3 a}{-13}=\frac{y-a}{3}=\frac{z}{1} \text { i.e, } \frac{x+\frac{3 a}{2}}{-13 / 2}=\frac{y-a}{3}=\frac{z}{1}(=t \text { say })\) …..(3)
Any point on (1) is P(2r, 3r + a, 4r – 3a).
∴ Plane of contact of P w.r.t. (2) is x.2r + y(3r + a) + z(4r – 3a) = a2
Any point on (3) is Q \(\left(\frac{-13 t-3 a}{2}, 3 t+a, t\right)\)
Substituting Q in the L.H.S of (4) we have
⇒ \(\frac{(-13 t-3 a)}{2} \cdot 2 r+(3 t+a)(3 r+a)+i(4 r-3 a)\)
= -13tr – 3ar + 9tr + 3ar + 3at + a2 + 4tr – 3at = a2 = R.H.S.
Also \(\frac{-13}{2} \cdot 2 r+3(3 r+a)+1(4 r-3 a)=-13 r+9 r+3 a+4 r-3 a=0\)
∴ (3) lies in (4) i.e., the plane of contact of all points on (1) w.r.t the sphere (2) pass through the line (3).
Example.3. Find the polar line of \(\frac{x-1}{2}=\frac{y-2}{3}=\frac{z-3}{4}\) …..(1) w.r.t. the sphere x2 + y2 + z2 = 16 …..(2)
Solution. Any point P on (1) is (2r + 1, 3r + 2, 4r + 3) say. polar plane of P w.r.t. (2) is
x(2r + 1) + y(3r + 2) + z(4r + 3) = 16
i.e. (x + 2y + 3z – 16) + r(2x + 3y + 4z) = 0
∴ For all values of r, the polar plane passes through the line
2x + 3y + 4z = 0 = x + 2y + 3z – 16, which is the required polar line.
Example.4. Find the locus of points whose polar planes w.r.t. the sphere x2 + y2 + z2 = a2 touch the sphere (x – α)2 + (y – β)2 + z2 = r2.
Solution. Let P = (x1, y1, z1). The polar plane of P w.r.t. x2 + y2 + z2 = a2 is
xx1 + yy1 + zz1 – a2 = 0
centre and radius of the sphere
(x – α)2 + (y – β)2 + z2 = r2 are (α, β, 0) and r.
(1) touches the sphere (x – α)2 + (y – β)2 + z2 = r2
⇒ distance of (α, β, 0) from (1) = r
⇒ \(\left|\frac{\alpha x_1+\beta y_1+0 . z_1-a^2}{\sqrt{x_1^2+y_1^2+z_1^2}}\right|=r\)
⇒ \(\left(\alpha x_1+\beta y_1-a^2\right)^2=r^2\left(x_1^2+y_1^2+z_1^2\right)\)
∴ The locus of P is \(\left(\alpha x+\beta y-a^2\right)^2=r^2\left(x^2+y^2+z^2\right)\).